EtherCAT协议详解:工业自动化高效总线
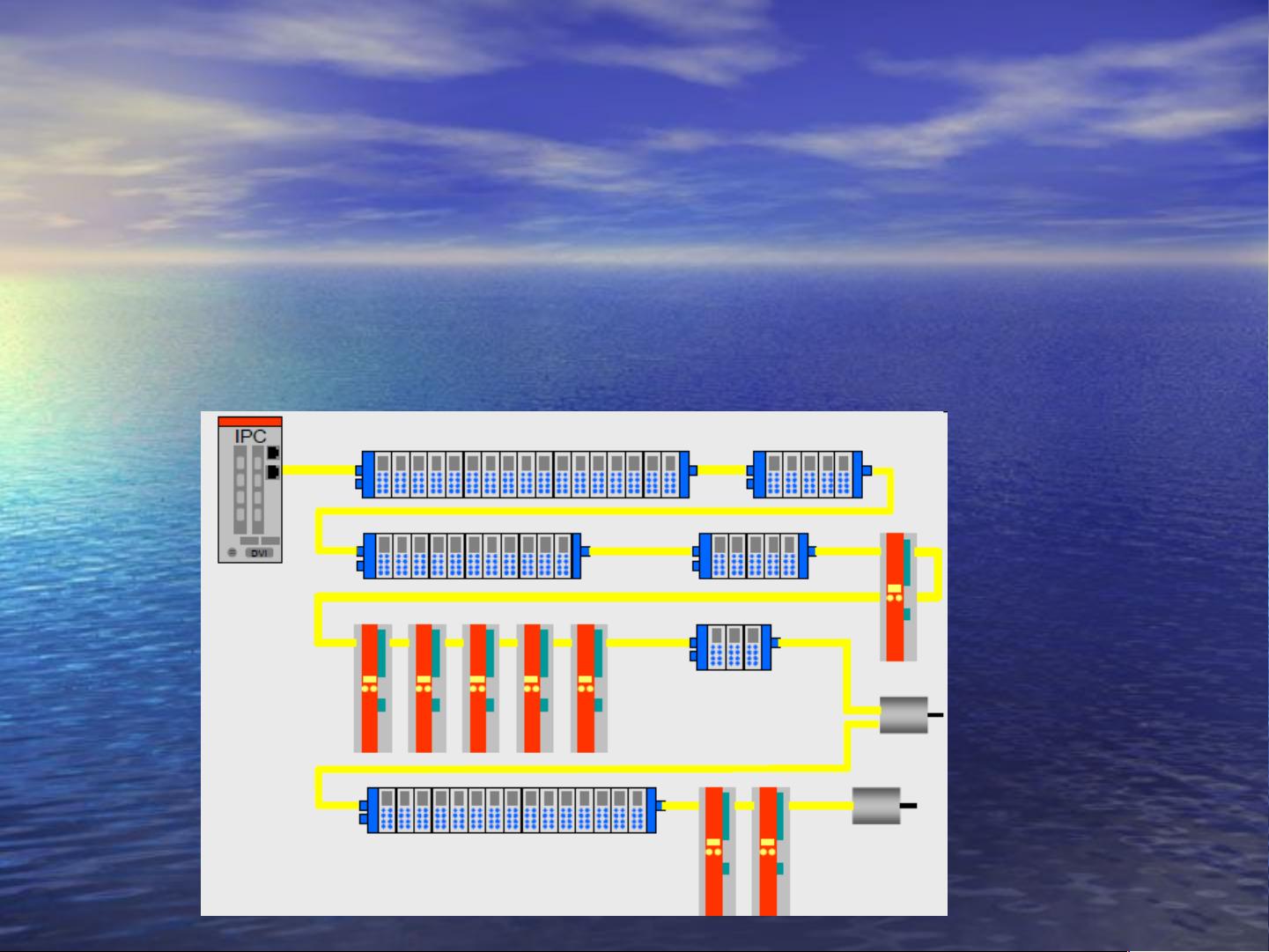
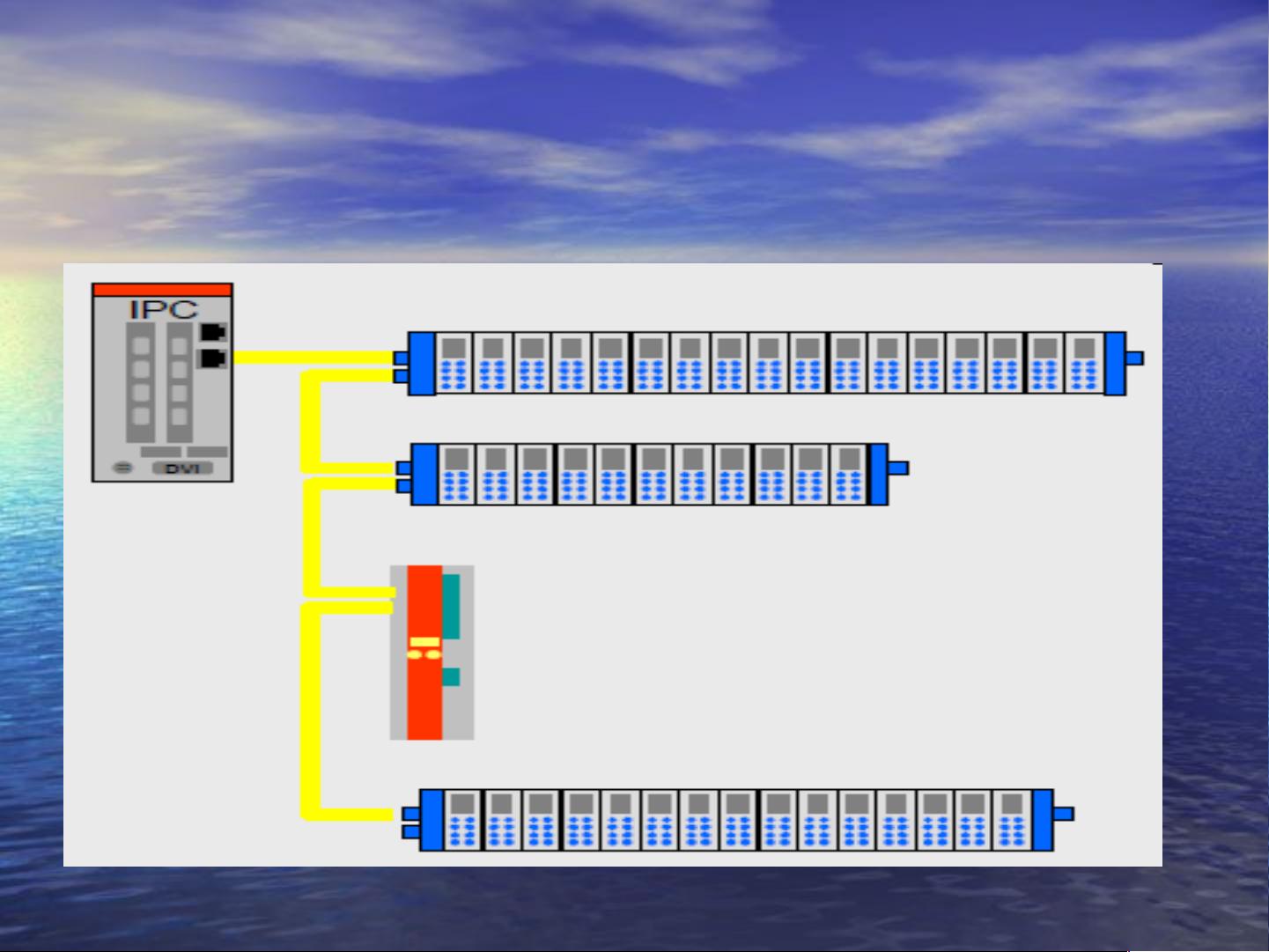
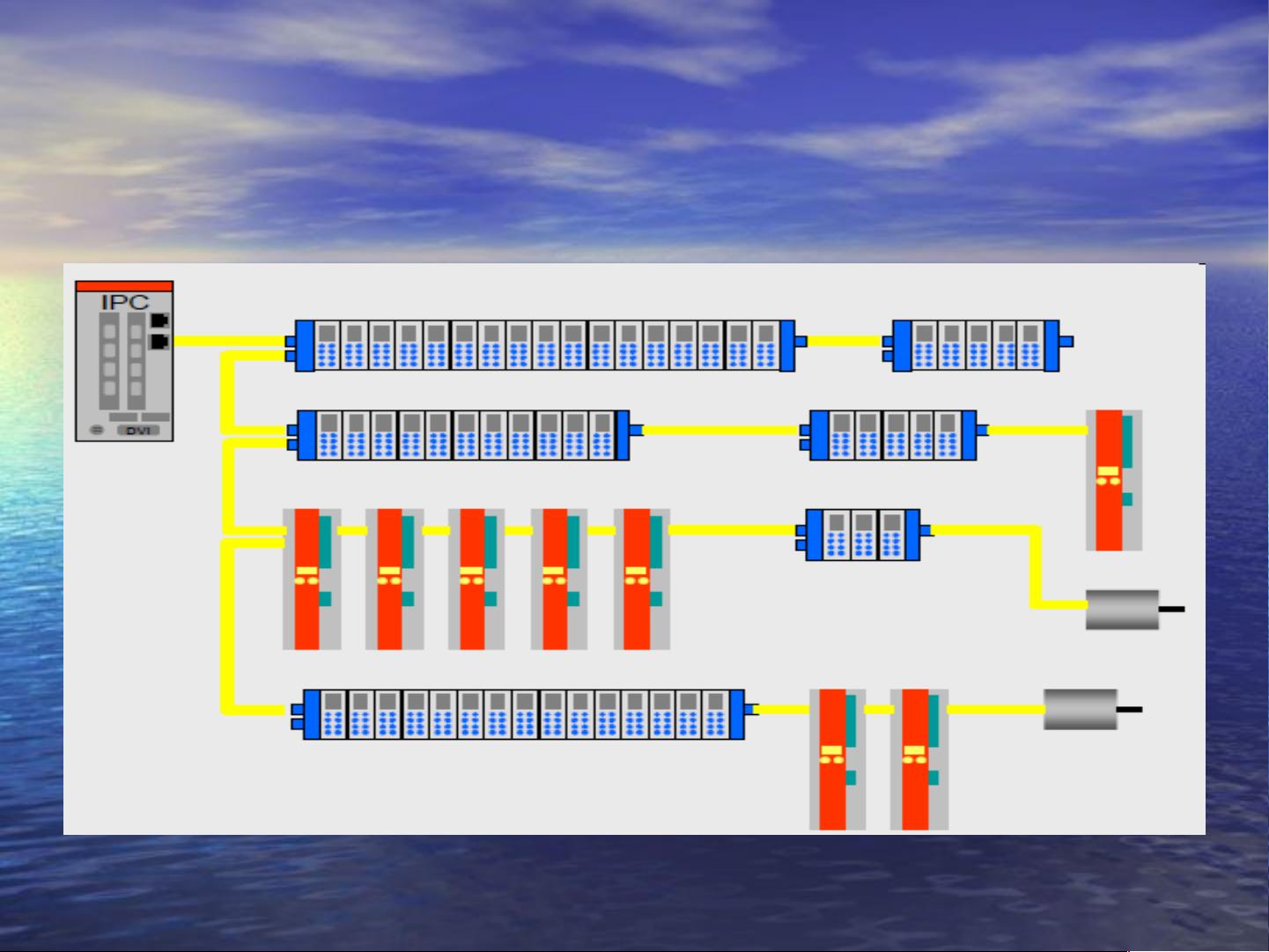
" EtherCAT协议是一种用于工业自动化领域的通信协议,其设计目标是实现高效、实时的网络通信。本文将深入探讨EtherCAT的工作原理、结构以及它在不同拓扑结构中的应用。\n\nEtherCAT(Ethernet for Control Automation Technology,控制自动化技术以太网)的核心理念是在以太网帧中进行“on-the-Fly”数据处理,这意味着数据可以在以太网帧通过网络时被快速读取和修改,无需像传统协议那样停顿或中断传输。这种机制允许 EtherCAT 实现极高的传输速度和低延迟,非常适合需要精确时间同步的工业自动化应用。\n\n在EtherCAT协议中,系统由一个主站(Master)和多个从站(Slaves)组成。从站结构包括Device Model、Physical Layer、Data Link Layer和Application Layer等多个层次。Device Model定义了从站的功能和行为,Physical Layer负责物理介质的连接,Data Link Layer则包含了帧结构、地址、命令、内存管理、同步管理器(Sync Manager)和FMMUs(Fieldbus Memory Management Units)。Diagnosis功能提供了故障检测和诊断能力,确保系统的稳定运行。\n\nDistributed Clocks是EtherCAT的一个关键特性,它确保所有从站在没有中央时钟的情况下也能保持精确的时间同步。这在需要精确控制的自动化环境中至关重要。\n\n在Application Layer,EtherCAT采用状态机模型来管理通信流程,同时利用Mailbox Protocols进行主站与从站间的通信。Slave Information Interface通常通过EEPROM来提供从站设备的配置和状态信息。Device Profiles定义了不同类型的设备如何实现EtherCAT协议,而Device Description则包含了设备的详细规格。此外,各种工具如配置工具和监控工具支持 EtherCAT 系统的设置、调试和监控。\n\nEtherCAT网络的拓扑结构非常灵活,可以是线型、链型、树形、星形,甚至带有冗余电缆的设计。例如,线型结构允许任意数量的设备串联,而实时星型结构则适用于需要快速响应的应用。电缆冗余设计提高了网络的可靠性,即使单条电缆出现故障,系统仍能保持正常运行。\n\nEtherCAT协议以其高效、实时和灵活的特性,成为了工业自动化领域的重要通信标准。无论是简单的线性布置还是复杂的分布式系统,EtherCAT都能提供卓越的性能和稳定性,满足各种工业控制需求。"
点击了解资源详情
2139 浏览量
389 浏览量
2258 浏览量
7043 浏览量
3464 浏览量
1207 浏览量
201 浏览量

qq_27390367
- 粉丝: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- A7Demo.appstudio:探索JavaScript应用开发
- 百度地图范围内的标注点技术实现
- Foobar2000绿色汉化版:全面提升音频播放体验
- Rhythm Core .NET库:字符串与集合扩展方法详解
- 深入了解Tomcat源码及其依赖包结构
- 物流节约里程法的文档整理与实践分享
- NUnit3.vsix:快速安装NUnit三件套到VS2017及以上版本
- JQuery核心函数使用速查手册详解
- 多种风格的Select下拉框美化插件及其js代码下载
- Mac用户必备:SmartSVN版本控制工具介绍
- ELTE IK Web编程与Web开发课程内容详解
- QuartusII环境下的Verilog锁相环实现
- 横版过关游戏完整VC源码及资源包
- MVC后台管理框架2021版:源码与代码生成器详解
- 宗成庆主讲的自然语言理解课程PPT解析
- Memcached与Tomcat会话共享与Kryo序列化配置指南
