模式分类:Richard O Duda的理论与应用
需积分: 45 179 浏览量
更新于2024-07-20
收藏 14.41MB PDF 举报
"Pattern Classification" 是一本由Richard O Duda, Peter E Hart和David G Stork合著的书籍,第二版由Wiley-Interscience出版。这本书主要探讨了模式识别这一领域,涵盖了机器感知、特征提取、噪声处理、过拟合、模型选择、先验知识等多个子问题。
在介绍部分,作者首先提到了机器感知,这是模式识别的基础,它涉及到如何让机器理解和解释输入的信息。接着,书中通过一个示例来说明模式识别的应用,并指出该领域与其他学科如人工智能、统计学、计算机视觉等的关联。
在讨论模式分类的子问题时,书中强调了以下几个关键点:
1. 特征提取:这是模式识别的第一步,涉及从原始数据中选择或构建有助于区分不同类别的特征。
2. 噪声:噪声是影响识别准确性的因素,需要有方法来减小或过滤掉它的影响。
3. 过拟合:当模型过于复杂,对训练数据过度适应时,可能会导致在新数据上的性能下降。
4. 模型选择:选择合适的模型是关键,需要平衡模型的复杂度和泛化能力。
5. 先验知识:利用先验知识可以指导模型构建,提高分类效果。
6. 缺失特征:处理缺失特征的情况,需要有策略来填补这些空缺。
7. 形态学(Mereology):研究对象的部分与整体关系,在图像分析和分割中有应用。
8. 分割:将图像或数据集分成有意义的区域或部分,以便进一步分析。
9. 上下文:考虑上下文信息可以帮助理解模式的含义,例如在自然语言处理中。
10. 不变性:设计不变性特征使系统能在不同条件下保持识别能力,如图像旋转不变性。
11. 证据整合:如何结合多个证据来源以做出更可靠的决策。
12. 成本和风险:识别过程中的错误可能有代价,需要权衡错误类型和代价。
13. 计算复杂性:识别算法应考虑计算效率,尤其是在大数据集上。
书中还提到了学习和适应的概念,包括监督学习、无监督学习和强化学习这三种主要的学习方式,这些都是模式识别中实现自我改进和优化的重要途径。
最后,作者总结了每章的主要内容,并提供了历史和文献方面的注解,以及参考书目,便于读者深入研究和扩展阅读。
《Pattern Classification》是一本深入探讨模式识别理论和技术的著作,涵盖了从基础概念到高级主题的广泛内容,对于理解并实践模式识别具有极高的参考价值。

4 CHAPTER 1. INTRODUCTION
images — variations in lighting, position of the fish on the conveyor, even “static”
due to the electronics of the camera itself.
Given that there truly are differences between the population of sea bass and that
of salmon, we view them as having different models — different descriptions, whichmodel
are typically mathematical in form. The overarching goal and approach in pattern
classification is to hypothesize the class of these models, process the sensed data
to eliminate noise (not due to the models), and for any sensed pattern choose the
model that corresponds best. Any techniques that further this aim should be in the
conceptual toolbox of the designer of pattern recognition systems.
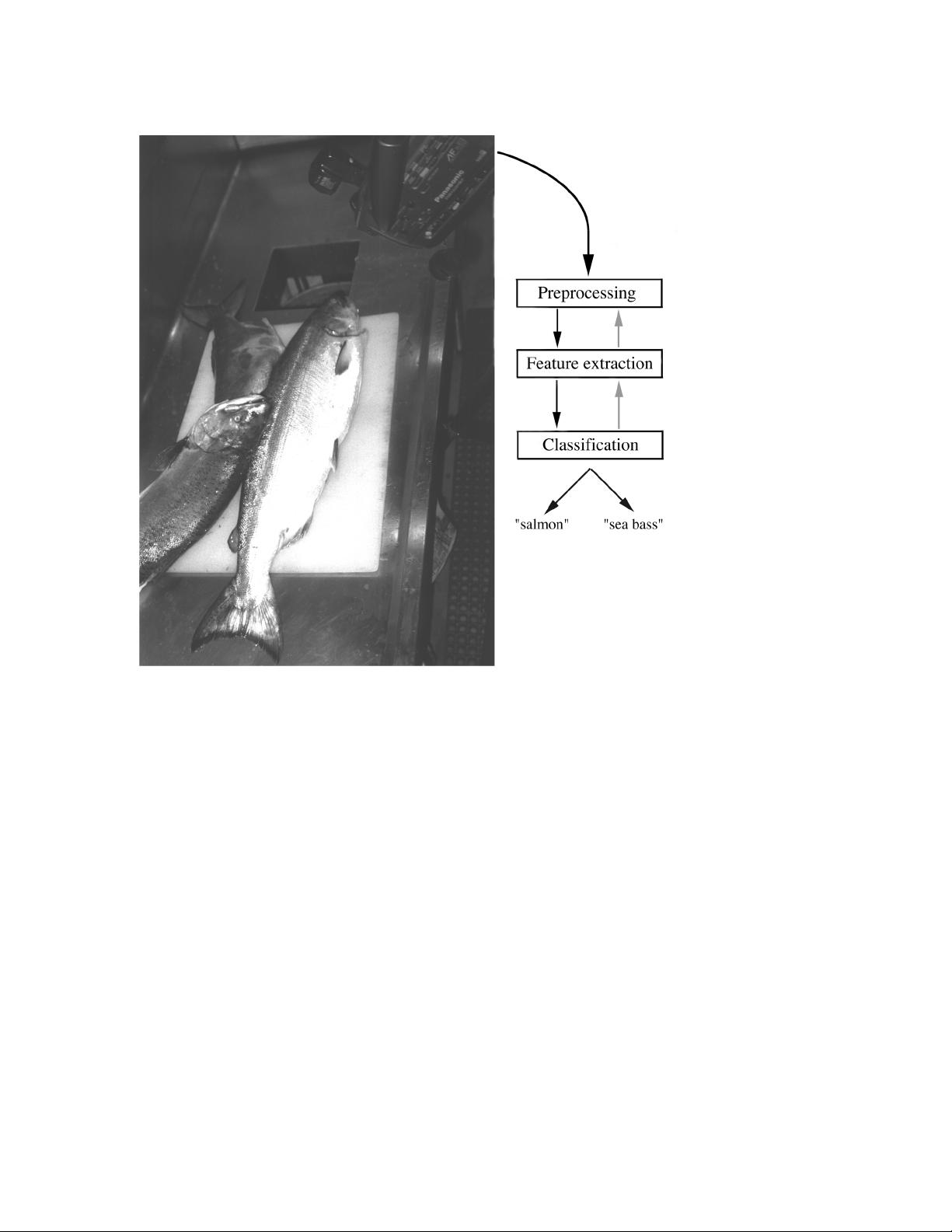
Our prototype system to perform this very specific task might well have the form
shown in Fig. 1.1. First the camera captures an image of the fish. Next, the camera’s
signals are preprocessed to simplify subsequent operations without loosing relevantpre-
processing information. In particular, we might use a segmentation operation in which the images
segmentation
of different fish are somehow isolated from one another and from the background. The
information from a single fish is then sent to a feature extractor, whose purpose is to
feature
extraction
reduce the data by measuring certain “features” or “properties.” These features
(or, more precisely, the values of these features) are then passed to a classifier that
evaluates the evidence presented and makes a final decision as to the species.
The preprocessor might automatically adjust for average light level, or threshold
the image to remove the background of the conveyor belt, and so forth. For the
moment let us pass over how the images of the fish might be segmented and consider
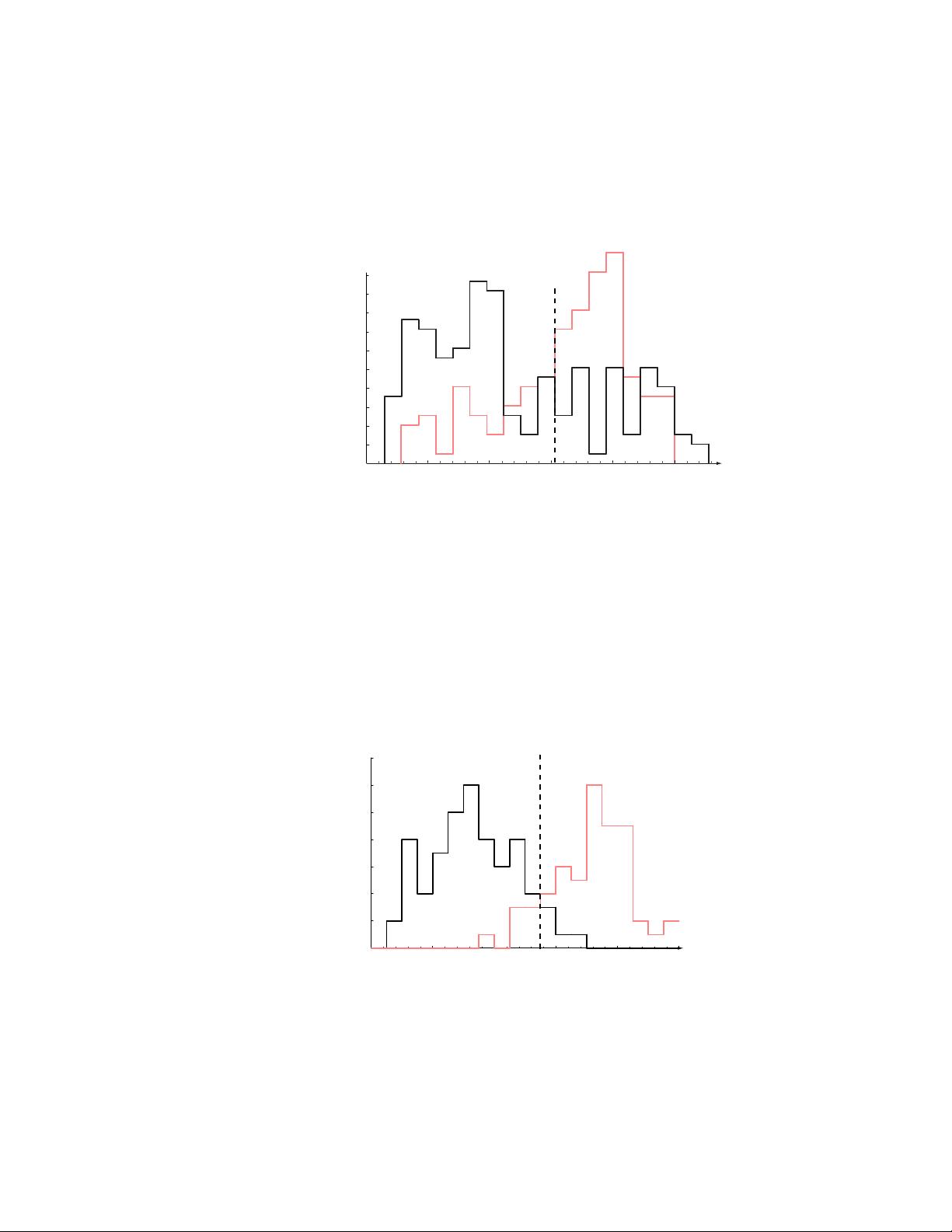
how the feature extractor and classifier might be designed. Suppose somebody at the
fish plant tells us that a sea bass is generally longer than a salmon. These, then,
give us our tentative models for the fish: sea bass have some typical length, and this
is greater than that for salmon. Then length becomes an obvious feature, and we
might attempt to classify the fish merely by seeing whether or not the length l of
a fish exceeds some critical value l
∗
. To choose l
∗
we could obtain some design or
training samples of the different types of fish, (somehow) make length measurements,training
samples and inspect the results.
Suppose that we do this, and obtain the histograms shown in Fig. 1.2. These
disappointing histograms bear out the statement that sea bass are somewhat longer
than salmon, on average, but it is clear that this single criterion is quite poor; no
matter how we choose l
∗
, we cannot reliably separate sea bass from salmon by length
alone.
Discouraged, but undeterred by these unpromising results, we try another feature
— the average lightness of the fish scales. Now we are very careful to eliminate
variations in illumination, since they can only obscure the models and corrupt our
new classifier. The resulting histograms, shown in Fig. 1.3, are much more satisfactory
— the classes are much better separated.
So far we have tacitly assumed that the consequences of our actions are equally
costly: deciding the fish was a sea bass when in fact it was a salmon was just as
undesirable as the converse. Such a symmetry in the cost is often, but not invariablycost
the case. For instance, as a fish packing company we may know that our customers
easily accept occasional pieces of tasty salmon in their cans labeled “sea bass,” but
they object vigorously if a piece of sea bass appears in their cans labeled “salmon.”
If we want to stay in business, we should adjust our decision boundary to avoid
antagonizing our customers, even if it means that more salmon makes its way into
the cans of sea bass. In this case, then, we should move our decision boundary x
∗
to
smaller values of lightness, thereby reducing the number of sea bass that are classified
as salmon (Fig. 1.3). The more our customers object to getting sea bass with their
剩余737页未读,继续阅读
2008-09-19 上传
2009-04-11 上传
2021-11-24 上传
2018-09-11 上传
2017-06-07 上传
点击了解资源详情
2024-01-12 上传
2017-11-23 上传
2009-05-08 上传

sinat_34672834
- 粉丝: 0
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- metaPORE:MetaPORE –加州大学旧金山分校Chiu实验室
- 蓝火博客信息网页模板
- AwesomeMQ:轻量级的分布式层,可为AMQP提供单播和多播
- 使用智能手机控制您的灯光系统-项目开发
- 高效的人脸网面检测
- java代码-实训4--3
- Explore:一个简单的Android浏览器
- 蓝色导航企业信息网页模板
- matlab导入excel代码-dev:开发者
- demo
- InformationSystemsWS1718
- yot:用于浏览4chan文本帖子的CLI
- React_Expense_tracker
- vite-react-app
- 蓝色商务建筑背景的工作总结汇报PPT模板
- 企业动态产品信息网页模板
