




ABB机器人WaitUntil指令详解:运动控制与速度限制
需积分: 50 24 浏览量
更新于2024-07-09
收藏 642KB PPT 举报
程序流程指令-WaitUntil是工业机器人编程中的一种关键指令,用于在满足特定条件(Cond)之前让机器人暂停执行后续操作。此指令主要用于确保任务按预期顺序进行,或者在满足某个外部输入信号(如传感器读数或达到预定位置)时继续执行。它接受以下参数:
1. **[\InPos]**: 提前量开关(Switch),用于设置一个阈值,当机器人接近或达到这个位置时,指令会检查条件是否满足。
2. **Cond**: 判断条件(Bool),即一个布尔表达式,可以基于机器人的当前位置、速度、状态或其他传感器数据来设定,只有当该条件为真时,WaitUntil才会结束。
3. **[\MaxTime]**: 最长等待时间(Num,单位为秒),定义了在满足条件前允许的最大等待时间,超过这个时间后,如果条件仍未满足,机器人会触发超时逻辑([\TimeFlag])。
4. **[\TimeFlag]**: 超时逻辑量(Bool),决定了在等待超时时的行为,可能是中断当前程序、返回到上一级程序或者其他自定义处理。
这些指令在自动化应用中尤其重要,比如在路径规划过程中,当机器人需要精确到达目标位置时,可以先使用WaitUntil来确保在达到安全距离或速度限制时才继续执行下一步动作。在示例中,如AccSet和VelSet指令展示了如何限制机器人的加速度和运行速度,以保证平稳运行并避免过度加速导致的系统响应延迟或机械冲击。
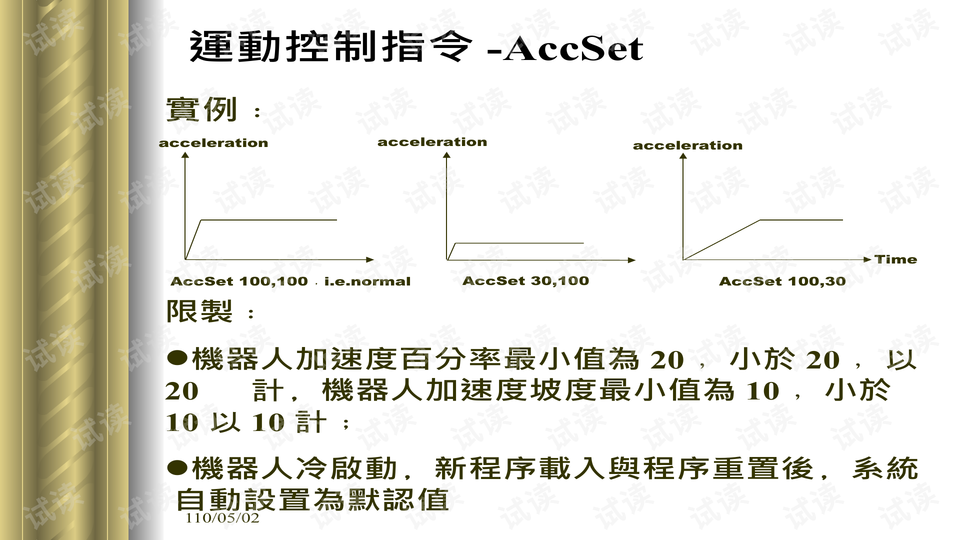
**运动控制指令**如AccSet(设置机器人加速度)和VelSet(设置运行速度)是程序设计的核心部分,它们允许程序员控制机器人的动态性能,例如,通过AccSet可以限制机器人在改变速度时的加速度变化,从而实现平滑过渡,减少振动。VelSet则用来限制实际运行速度,确保不会超过预设的最大速度,这在防止碰撞和提高生产效率方面至关重要。
在编程实例中,例如设置AccSet为30%和100%,体现了对不同情况下的速度控制:正常运行(默认值)以及在特殊情况下如冷启动或速度限制时的速度设置。VelSet指令则被用来调整具体运动命令(如MoveLp)中的运行速度,并确保不会超过最大速度限制。
通过结合这些指令,程序员能够编写出精细控制的机器人程序,以适应各种工作场景的需求,提升生产效率和机器人的精确度。理解并有效利用这些指令对于任何从事ABB机器人编程的人来说都是不可或缺的技能。
下载后可阅读完整内容,剩余24页未读,立即下载
2023-04-03 上传
4758 浏览量
2021-11-24 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

劳劳拉
- 粉丝: 24
 我的内容管理
展开
我的内容管理
展开







最新资源
- Windows环境下PHP安装至IIS的详细教程
- Redis 3.2.9安装包与3.2.1集群工具包整合压缩发布
- C++编程:实现自定义时钟类的详细指南
- 蓝色简约企业网站模板制作教程
- 智能PID控制技术在温度系统中的应用详解
- 打造iPhone泡泡效果的HTML实现教程
- 掌握算法竞赛之道:新版小白标程详解
- Spring MVC下FTP文件管理系统的实现与搭建
- Kubernetes深度解析与应用实战指南
- S7-200与MM440通过USS协议通信实例解析
- 期末成绩统计表数据分析与管理
- VBA 6.0及2003版本帮助文档手册
- vsstyle.h源码分析及使用指南
- HTML5动态火焰燃烧动画特效展示
- 深入学习RTMP协议:必读文档1.0版本
- STC12C5A60S2控制的32*64点阵屏时钟及红外遥控代码






















