增强型有界相关:快速全搜索模板匹配
"本文提出了一种名为增强型有界相关(Enhanced Bounded Correlation, EBC)的新算法,显著减少了基于归一化互相关(Normalized Cross Correlation, NCC)的模板匹配所需的计算量,同时能与全搜索算法达到相同的结果。该算法利用匹配函数的边界概念,通过找到一个可高效计算的NCC上界来快速剔除那些无法提供比当前最佳匹配更好分数的候选模板。在这一框架下,我们应用了一系列逐步收紧的上界函数,这些函数基于Cauchy-Schwarz不等式。此外,通过将在线参数预测步骤引入EBC,我们得到了一个无需手动调整参数的算法,它在大多数情况下,能够提供与最优离线参数调整相当的计算优势。实验结果证明了该算法的有效性和实时性能,特别是在处理遮挡、阴影、转向和光照变化等问题时表现优秀,具有很强的鲁棒性。"
这段摘要主要讲述了计算机视觉领域中的一个算法优化问题,特别是针对图像处理中的模板匹配技术。模板匹配是图像分析和识别中的关键步骤,通常用于寻找图像中的特定模式或区域。NCC是一种常用的方法,它通过比较模板图像和目标图像的像素相关性来评估相似度。然而,全搜索NCC算法的计算复杂度高,不适合实时应用。
EBC算法则提出了一种新颖的解决方案,通过建立匹配函数的上界来减少计算量。这种方法的核心思想是,如果一个候选模板的NCC分数不能超过当前最佳模板的分数,那么就可以提前停止对它的计算,从而提高了效率。Cauchy-Schwarz不等式在这里起到了关键作用,它提供了构建这种上界的一种数学工具。
进一步,EBC算法还包含了一个在线参数预测步骤,使得算法能够在运行过程中自动调整,无需预先进行耗时的参数优化。这极大地增强了算法的实用性,使其在大多数场景下都能保持高效的性能。
实验结果证实了EBC算法的优越性,尤其是在处理图像中的复杂情况如遮挡、阴影、物体旋转以及光照变化时,其鲁棒性得到了体现。这对于实时应用,例如视频监控、自动驾驶车辆的视觉系统等,是非常重要的。EBC算法为提高NCC模板匹配的效率提供了一种有效且实用的方法,对于计算机视觉领域的研究和应用具有重要意义。
530 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 17, NO. 4, APRIL 2008
then the following inequality holds:
(12)
Proof: See Appendix I.
B. Property I
Let
and . Hence,
then the following inequalities hold:
(13)
Proof: The left inequality can be easily derived from the
application of the Cauchy–Schwarz inequality to each subvector
pair defined by subsets
. The right inequality
can be obtained directly from successive applications of the pre-
vious lemma.
Property I states that an upper-bound of , the cross correla-
tion between vectors
, can be obtained by applying -times
the Cauchy–Schwarz inequality to the subvector pairs defined
by subsets
, and that this bound is tighter than the upper bound
attainable by applying the inequality to the original vectors
.
C. Property II
Let
and . Hence,
then the following inequalities hold:
(14)
Proof: Similar to Property I, the left inequality derives
from the application of the Cauchy–Schwarz inequality to each
subvector pair defined by subsets
.
The right inequality is easily proved by applying the
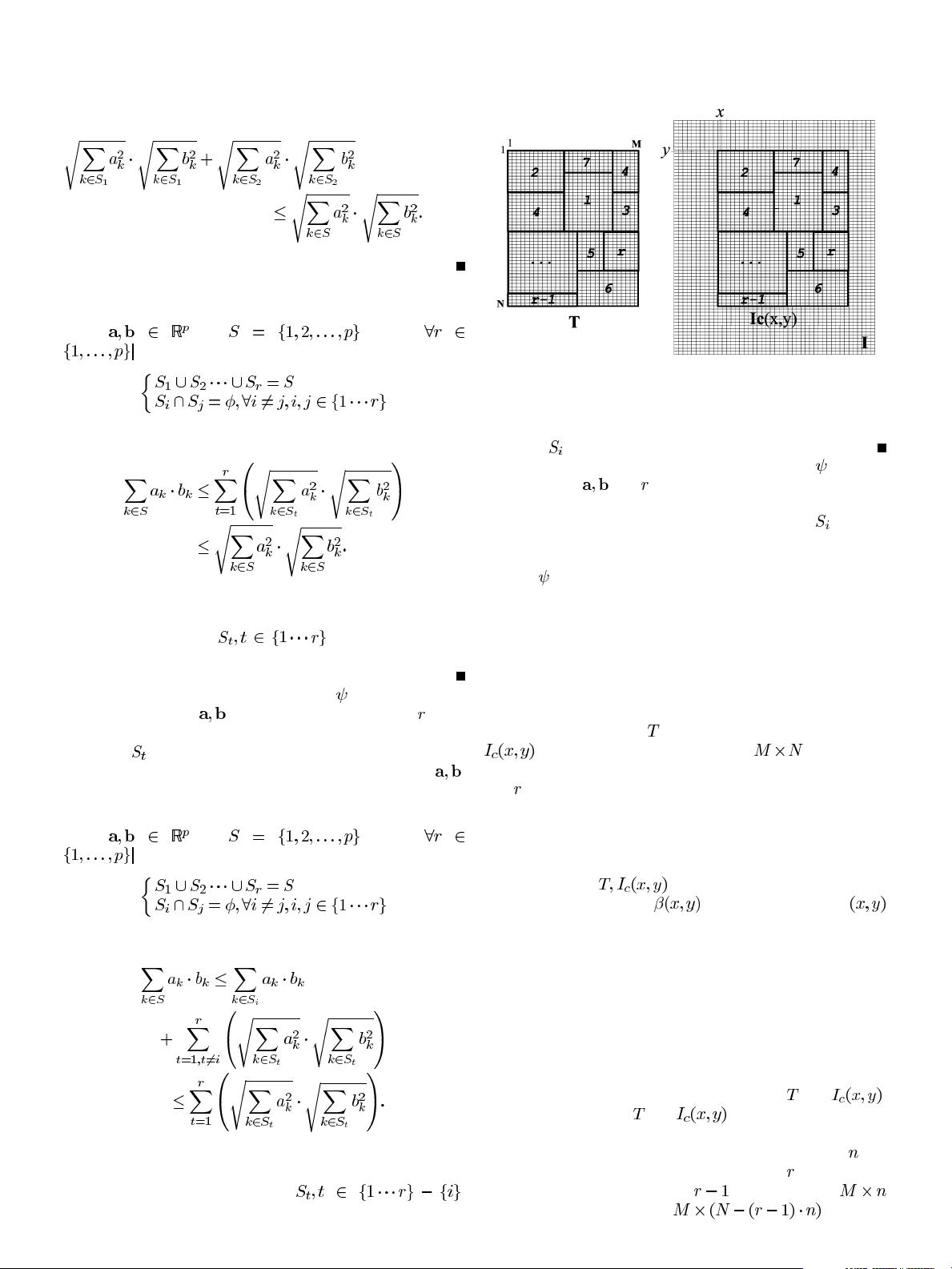
Fig. 1. Generic partitioning of template and current image subwindow.
Cauchy–Schwarz inequality to the subvector pair defined
by subset
.
Property II tells us that given an upper bound of
obtained
by partitioning
into subvectors as defined in Property I, a
tighter upper bound can be obtained by replacing the product-of-
norms term related to the subvector pair defined by
with the
corresponding cross correlation term. Successive applications
of Property II yield increasingly tighter upper-bounding func-
tions of
, each step of the succession requiring the computa-
tion of a new cross correlation term associated with a subvector
pair so as to replace the corresponding product-of-norms term.
V. C
ORE EBC ALGORITHM
This section describes the core EBC algorithm, which relies
on the mathematical properties presented in Section IV. First
of all, both the template
and the current image subwindow
are seen as vectors belonging to a -dimensional
space and Fig. 1 shows a generic partitioning of such vectors
into
subvectors, as required by Properties I and II. In general
a subvector can consist of disjoint sets of pixels, as is the case
of subvector 4 in Fig. 1.
To deploy the properties of Section IV within the bounded
correlation framework outlined in Section III, we define a parti-
tioning of vectors
and apply Property I at first, to ob-
tain an initial upper bound
at each image position
and check the associated skipping condition (7) that does not re-
quire calculation of any partial correlation term. If such a initial
condition is not verified, we then apply Property II in successive
steps. At each step, the product-of-norms term of a subvector
pair is replaced by the corresponding cross-correlation term, to
obtain a tighter bounding function and associated skipping con-
dition (7).
For reasons of computational efficiency, in a practical deploy-
ment of the EBC principle it is preferable to adopt a kind of
“regular” partitioning scheme to be applied to
and .
In our implementation
and are partitioned into sub-
vectors made out of successive rows, as shown in Fig. 2. All
subvectors are chosen to have the same number of rows,
,ex-
cept for the last one (e.g., in Fig. 2, subvector
). Hence, with
our partitioning scheme the first
subvectors have
elements and the last one has elements.
剩余10页未读,继续阅读
733 浏览量
161 浏览量
399 浏览量
109 浏览量
217 浏览量
173 浏览量
268 浏览量

madmale_wzr
- 粉丝: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- Saber仿真下的简化Buck环路分析与TDsa扫频
- Spring框架下使用FreeMarker发邮件实例解析
- Cocos2d捕鱼达人路线编辑器开发指南
- 深入解析CSS Flex布局与特性的应用
- 小学生加减法题库自动生成软件介绍
- JS颜色选择器示例:跨浏览器兼容性
- ios-fingerprinter:自动化匹配iOS配置文件与.p12证书
- 掌握移动Web前端高效开发技术要点
- 解决VS中OpenGL程序缺失GL/glut.h文件问题
- 快速掌握POI技术,轻松编辑Excel文件
- 实用ASCII码转换工具:轻松实现数制转换与查询
- Oracle ODBC补丁解决数据源配置问题
- C#集成连接器的开发与应用
- 电子书制作教程:你的文档整理助手
- OpenStack计费监控:使用collectd插件收集统计信息
- 深入理解SQL Server 2008 Reporting Services
