倒立摆系统Lagrange方程建模与模糊控制方法
需积分: 9 148 浏览量
更新于2024-08-11
收藏 712KB PDF 举报
"这篇论文是2002年的自然科学论文,由宋君烈、肖军和徐心和共同撰写,得到了国家自然科学基金的支持。研究主要关注倒立摆系统的建模和控制,特别是通过Lagrange方程进行动力学建模,并提出了一种模糊控制策略。该方法降低了建模复杂性,并在仿真和实际物理系统实验中验证了控制方法的有效性。倒立摆系统作为非线性、多变量和强耦合的不稳定系统,是控制理论研究的重要对象,涉及镇定、非线性、鲁棒性等多个关键问题。论文中,作者们利用Lagrange方程的优势,即简化微分方程组的求解和排除约束反力的影响,来建立系统的数学模型。"
这篇论文深入探讨了倒立摆系统的动态建模和控制策略。倒立摆系统由于其多变量、非线性和强耦合的特性,对控制理论提出了严峻挑战。传统的牛顿运动定律建模方法会涉及到复杂的微分方程组求解,且需考虑约束条件,这使得建模变得困难。为了解决这个问题,论文引入了Lagrange方程,这是一种分析力学的方法,它允许用广义坐标来表示系统的运动方程,方程的数量与系统的自由度一致,且不需考虑理想约束反力,简化了建模过程。
论文中提出的模糊控制方法基于模糊组合变量,这种控制策略在处理倒立摆系统这类非线性系统的控制问题时,能够有效应对不确定性,提高控制性能。通过仿真研究和实际物理系统实验,该模糊控制方法被证实能够有效地稳定倒立摆系统,显示出其在解决复杂控制问题上的潜力。
此外,倒立摆系统的控制也涉及到其他关键问题,如系统的镇定、非线性控制、鲁棒性及跟踪问题。这些挑战是控制理论研究的核心,也是倒立摆系统作为研究平台的价值所在。论文引用了前人的研究成果,表明了该领域的研究是持续和广泛的,而提出的Lagrange方程建模与模糊控制相结合的方法,为这一领域的研究提供了一个新的视角和实用工具。
这篇论文展示了Lagrange方程在复杂系统建模中的优势,以及模糊控制在解决非线性控制问题中的有效性,对于理解和改进不稳定系统的控制策略具有重要的理论和实践意义。
收稿日期
基金项目 国家自然科学基金资助项目
作者简介 挝宋君烈 男 辽宁大连人 东北大学副教授 徐心和 男 河北山海关人 东北大学教授 博士生导师
年 月
第卷第期
东 北 大 学 学 报 自 然 科 学 版
Journal of Northeastern UniversityNatural Science
Apr
Vol No
文章编号
倒 立 摆 系 统 的 L agrange 方 程
建 模 与 模 糊 控 制
宋君烈 肖 军 徐心和
东北大学 信息科学与工程学院 辽宁 沈阳
摘 要 针对多变量 非线性和强耦合性的倒立摆系统 采用分析力学中的 Lagrange 方程来
建立其动力学方程 并提出一种基于模糊组合变量的控制方法
研究结果表明 利用分析动力学方
法来建立倒立摆系统的数学模型可以大大降低建模的复杂性 仿真研究和实际物理系统的实验结
果证明了所提出控制方法的有效性
关 键 词 自动控制 倒立摆 Lagrange 方程 模糊控制
中图分类号 T P 文献标识码 A
倒立摆系统是一个典型的多变量 非线性 强
耦合和快速运动的自然不稳定系统
在控制过程
中能反 映 控 制 中 的 许 多 关 键 问 题 如 镇 定 问
题
非线性问题
鲁棒性问题
随动问题
以及跟踪问题等
各国专家学者在这一领域进行
了长期不懈的研究和探索
对于倒立摆系统
这样一个多变量 非线性和强耦合系统 目前还没
有一个确定的方法来实现其控制问题
为减少实
验的盲目性 通常先建立系统的数学模型 然后进
行仿真研究 在此基础上进行实际系统的实验
在
建立倒立摆系统的模型时 一般采用牛顿运动定
律 结果要解算大量的微分方程组 而且考虑到质
点组受到的约束条件 建模问题将更加复杂 为此
本文采用分析力学方法中的 Lagrange 方程
推
导倒立摆的系统模型
Lagrange 方程有如下特点
它是以广义坐标表达的任意完整系统的运动方
程式 方程式的数目和系统的自由度数是一致的
理想约束反力不出现在方程组中 因此在建立
运动方程式时 只需分析已知的主动力 而不必分
析未知的约束反力
Lagrange 方程是以能量观
点建立起来的运动方程式 为了列出系统的运动
方程式 只需要从两个方面去分析 一个是表征系
统运动的动力学量 系统的动能 另一个是表征
主动 力 作 用 的 动 力 学 量 广 义 力
因 此 用
Lagrange 方程来求解系统的动力学方程可以大大
简化建模过程
本文首先利用 Lagrange 方程建立
倒立摆系统的数学模型 根据所研究对象的多变
量 非线性特性 提出一种基于模糊组合变量的控
制方法 并对所提出的方法进行了仿真研究和实
际物理系统的实验 实验结果证明了该方法的有
效性
倒立摆系统数学模型的推导
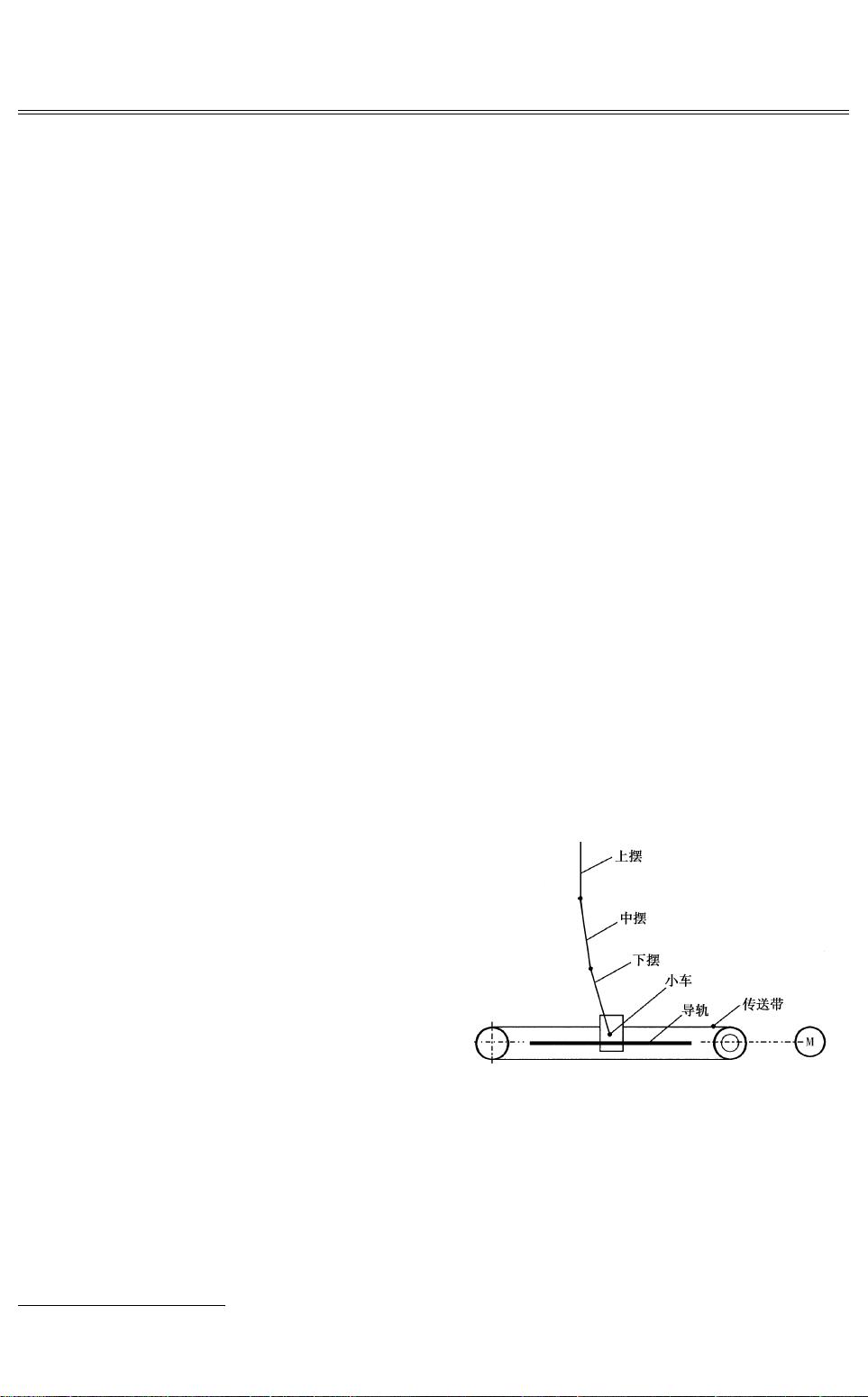
倒立摆系统的结构和工作原理如图 所示
图 1 倒立摆装置示意图
Fig 1 The inverted pendulum system
倒立摆装置由沿导轨运动的小车和通过转轴
固定在小车上的摆体组成
在轨道一端装有用来
测量小车位移的电位计
摆体与小车之间 摆体与
摆体之间由轴承连接 并在连接处有 个电位器
分别用来测量下摆 中摆和上摆的角度
直流电机
通过传送带控制小车的运动 从而使倒立摆稳定
下载后可阅读完整内容,剩余4页未读,立即下载
1096 浏览量
点击了解资源详情
915 浏览量
189 浏览量
204 浏览量
2021-07-12 上传
2443 浏览量
2021-07-12 上传
2022-09-24 上传

weixin_38625184
- 粉丝: 4
- 资源: 947
 我的内容管理
展开
我的内容管理
展开







最新资源
- portfolio-nextjs
- PIC16F87X中英文数据手册.zip
- C++自制登录注册系统
- lms:Leave Management System by revel, golang. 请销假管理系统
- key-value-store
- java-learning
- c26
- 4steroidRush:4steroid Rush 源代码
- AutoSuggestSearch:改善搜索体验! 在搜索时接收产品,类别建议和产品缩略图
- 某地产公司营销中心管理规则
- Unity-Projects:学习C#和Unity
- CashBackForceTestTask
- iucn_dashboard
- 温度报警器程序源码(好用)
- CakeHaml:cakephp3插件的haml模板引擎
- VB6_Dos路径转化为正常的路径.rar
