VB/VC 实现AKD驱动器Modbus TCP通讯教程
"这篇文档详细介绍了如何使用VB和VC来实现与AKD驱动器通过Modbus TCP/IP协议进行通信。AKD驱动器支持Modbus TCP,允许用户读写驱动器中的数据。文中提供了具体的编程示例,包括建立网络连接和发送读取多个字的命令的步骤。"
在工业自动化领域,Modbus TCP/IP是一种广泛使用的通信协议,它允许设备通过TCP/IP网络进行数据交换。在本教程中,重点是使用Visual Basic (VB) 和 Visual C++ (VC) 这两种编程语言来构建一个能够与Kollmorgen的AKD驱动器进行Modbus TCP通信的应用程序。
首先,AKD驱动器配置为使用Modbus TCP通讯模式,例如设置拨码S1为0,S2为2,这样可以访问到特定的地址。文档中提到的表格可能列出了这些地址与驱动器参数的对应关系,但具体地址没有直接给出。
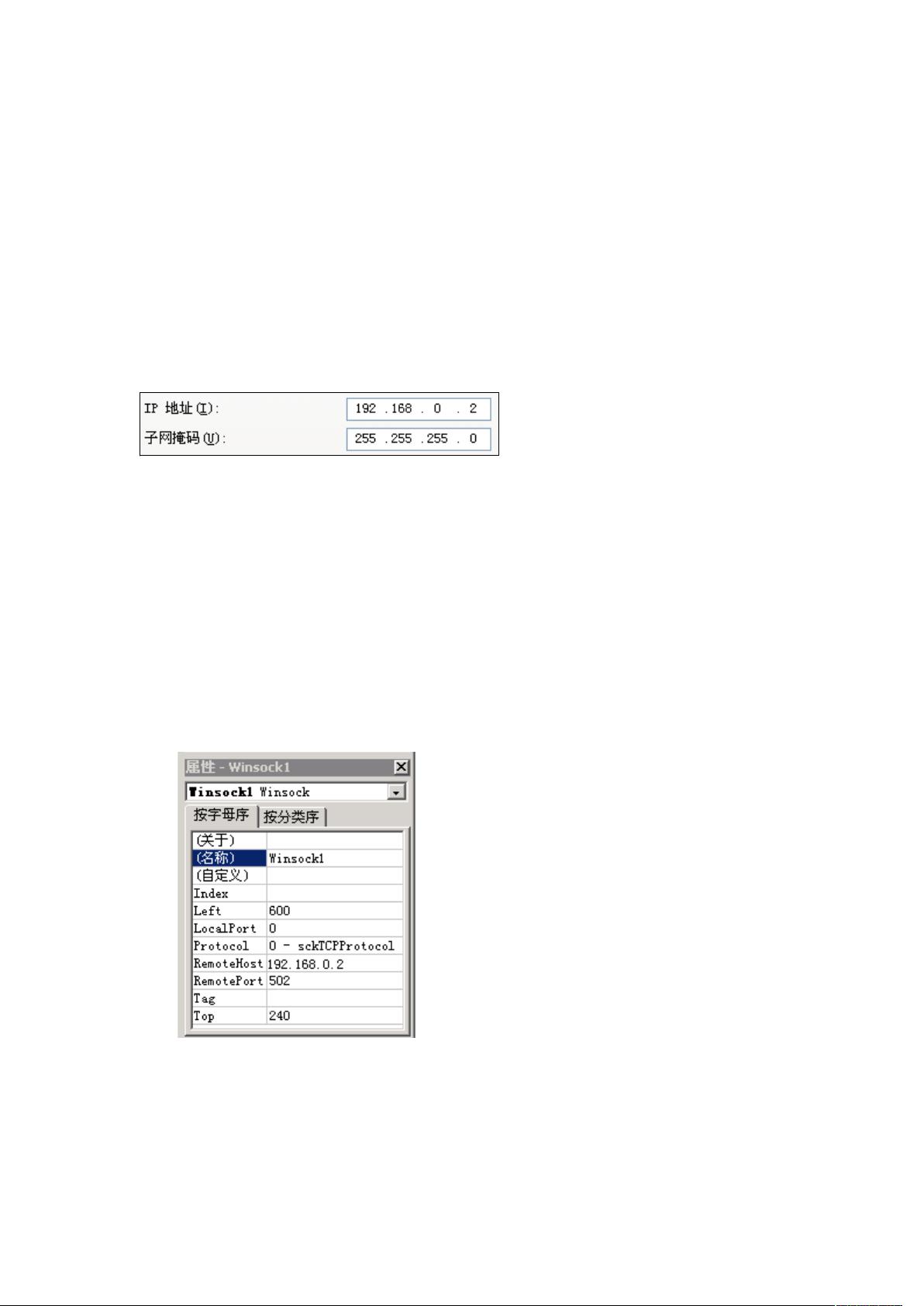
在VB中,利用WinSock控件可以轻松实现网络连接。WinSock控件被初始化,设置其属性,如远程主机IP(AKD驱动器的IP地址)和端口号(通常是502,Modbus TCP的标准端口)。然后,通过调用`Connect`方法建立连接,如果连接过程中出现错误,会显示错误信息。
接着,文档展示了如何发送读取多个字的Modbus请求。在Modbus协议中,每个请求由一系列字节组成,包含了事务标识符、协议标识符、数据长度、单元标识符、功能代码、起始地址和要读取的数据长度。在VB代码示例中,这些字节被填充到一个字节数组`SendStr`中,并转化为字符串`aStr`,最后通过`SendData`方法将数据发送给驱动器。
当发送数据成功后,通常会等待响应,然后解析返回的数据。虽然这个例子没有展示接收和解析数据的代码,但在实际应用中,需要监听WinSock控件的`DataAvailable`事件,以接收驱动器返回的数据,并根据Modbus协议的格式解析出实际的驱动器状态或参数值。
这份文档提供了一个基础的VB/VC实现Modbus TCP与AKD驱动器通讯的框架,有助于开发者理解如何构建自己的应用程序来控制和监控AKD驱动器。在实际项目中,需要根据具体的设备地址和功能需求,扩展和完善此代码以实现完整的通信功能。
PC 做 AKD Modbus TCP/IP 的通讯
AKD 驱动器支持 Modbus TCP 的通讯,可以实现对 AKD 驱动器中的数据进行读
写。
譬如拨码 S1=0,S2=2
对应的地址是
对于上位机,我们利用 VB 的 WinSock 套接字控件能很容易的进行编程。
新建 1 个套接字对象,设定其属性如右,注意其远程主机的 IP 就是以上 AKD 的 IP 地
址:
1. 建立网络连接
Private Sub Command2_Click()
On Error Resume Next
下载后可阅读完整内容,剩余6页未读,立即下载
2021-03-15 上传
2022-05-08 上传
2019-06-01 上传
2022-05-08 上传

victorymorn
- 粉丝: 5
- 资源: 21
 我的内容管理
展开
我的内容管理
展开







最新资源
- 网上书店可行性分析与需求分析
- C语言编程规范.pdf
- SQL server服务器大内存配置
- 世界上最全的oracle笔记 oracle 资料
- Programming C#
- MIT Linear Programming Courseware- example
- 一份在线考试系统的详细开发文档C#
- 在线考试系统需求说明
- 企业网站推广经合与体会
- convex optimization
- 芯源电子单片机教程(推荐).pdf
- c语言学习300例(实例程序有源码)
- thinking in java
- How to create your library
- Microsoft Windows CE学习资料
- _CC2001教程_研究与思考.pdf
