电磁竞赛车模:路径检测与设计详解
需积分: 15 67 浏览量
更新于2024-07-26
收藏 623KB PDF 举报
电磁组竞赛车模路径检测设计参考方案是针对第五届全国大学生智能汽车竞赛中新增的电磁组比赛而提出的。这项技术要求参赛者设计的车模能够自动识别赛道中心线位置,该位置处由100mA交变电流产生的电磁场。这一检测任务对于初次参赛队伍来说具有挑战性,因此该方案旨在提供一个简单易懂的设计思路,帮助他们快速进入实际制作和调试阶段。
方案的核心基于麦克斯韦电磁场理论,利用20kHz的交流电流产生的甚低频(VLF)电磁波进行导航。VLF波的波长在100km至10km之间,与赛道尺寸相比大得多,因此车模需要通过检测微弱的电磁场变化来推断导线的位置。由于电磁波能量传输有限,特别是当车模尺寸远小于波长时,设计的关键在于将动态磁场近似为静态磁场,利用毕奥-萨伐尔定律来测量磁场强度和方向,从而确定车模与导线的距离。
设计原理包括两个主要部分:
1. 导线周围的电磁场:交变电流会产生周期性的电场和磁场,它们按照特定规律分布在空间。通过测量这些电磁场的强度和变化,车模可以推算出自身与导线之间的相对位置。为了应对微弱信号,方案假设赛道导航电线周围的变化磁场可以近似看作是缓变的,这样可以采用常规的静态磁场检测方法。
2. 磁场检测:依据毕奥-萨伐尔定律,给定电流I和导线长度L,可以通过计算得到不同距离r处的磁感应强度。无限长直导线周围的磁场强度呈现出同心圆的分布,离导线越远,磁场强度下降得越快。设计中的车模需要具备精确测量这种磁场分布的能力,以便实时调整行驶策略。
微型车模的运行录像展示了这套方案在实际环境中的效果,证明了其可行性。参赛队伍可以根据这个基础设计进行改良和优化,以适应比赛的具体需求和限制。同时,查阅《第五届智能汽车竞赛细则》的技术文档,可以获得更详细的比赛规则和技术参数,确保设计方案符合赛事要求。
导线中的电流按一定规律变化时,导线周围的磁场也将发生变化,则线圈中
将感应出一定的电动势。 根据法拉第定律,线圈磁场传感器的内部感应电压
E
与
磁场 ()
B
t 、电磁线圈的圈数 N 、截面积 A的关系有:
0
() ()
()( )
r
dB t d t
ENA
dt dt
μμ
Φ
=× =−
感应电动势的方向可以用楞次定律来确定。
由于本设计中导线中通过的电流频率较低,为 20kHz,且线圈较小,令线圈
中心到导线的距离为 r ,认为小范围内磁场分布是均匀的。再根据图 3 所示的
导线周围磁场分布规律,则线圈中感应电动势可近似为:
()dt kdIK
E
dt r dt r
Φ
=− = =
(2)
即线圈中感应电动势的大小正比于电流的变化率,反比于线圈中心到导线的
距离。其中常量
K
为与线圈摆放方法、线圈面积和一些物理常量有关的一个量,
具体的感应电动势常量须实际测定来确定。
3
、双水平线圈检测方案
不同的线圈轴线摆放方向,可以感应不同的磁场分量。我们先讨论一种最简
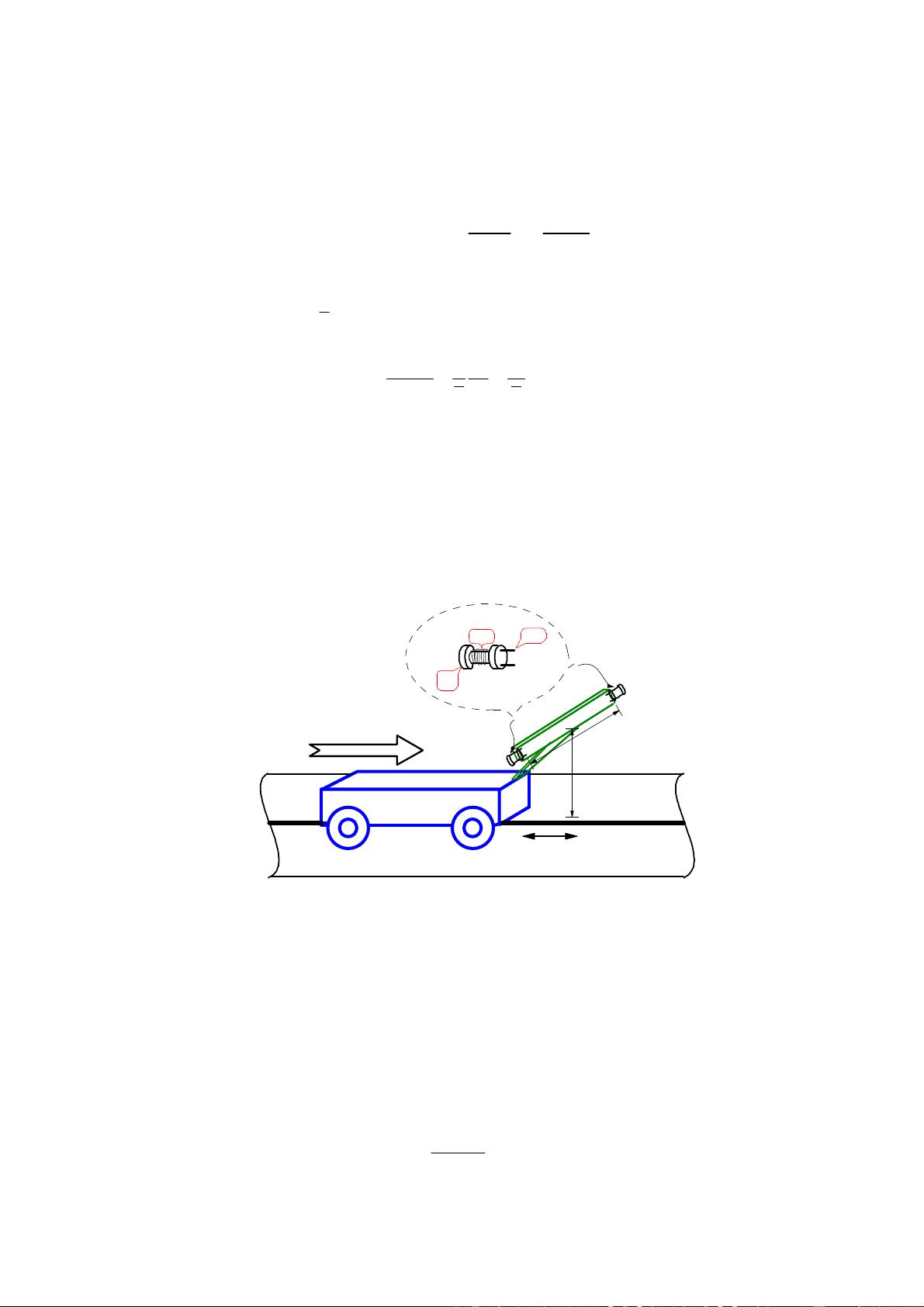
单的线圈设置方案:双水平线圈检测方案。在车模前上方水平方向固定两个相距
L
的线圈,两个线圈的轴线为水平,高度为 h ,如下图所示:
赛道中心线
模型车
运动方向
电流/100mA
10mH
磁性
材料
线圈
引脚
L
h
图5 双水平线圈检测方案
为了讨论方便,我们在跑道上建立如下的坐标系,假设沿着跑道前进的方向
为z轴,垂直跑道往上为y轴,在跑道平面内垂直于跑到中心线为x轴。xyz轴满足
右手方向。
假设在车模前方安装两个水平的线圈。这两个线圈的间隔为L,线圈的高
度为h,参见下图5所示。左边的线圈的坐标为(x,h,z),右边的线圈的位置(x-L,h,z)。
由于磁场分布是以z轴为中心的同心圆,所以在计算磁场强度的时候我们仅仅考
虑坐标(x,y)。
由于线圈的轴线是水平的,所以感应电动势反映了磁场的水平分量。根据公
式(2)可以知道感应电动势大小与
22
h
x
h
+
成正比。
剩余19页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2019-11-30 上传
2021-12-02 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

cheng19172516CPL
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular实现MarcHayek简历展示应用教程
- Crossbow Spot最新更新 - 获取Chrome扩展新闻
- 量子管道网络优化与Python实现
- Debian系统中APT缓存维护工具的使用方法与实践
- Python模块AccessControl的Windows64位安装文件介绍
- 掌握最新*** Fisher资讯,使用Google Chrome扩展
- Ember应用程序开发流程与环境配置指南
- EZPCOpenSDK_v5.1.2_build***版本更新详情
- Postcode-Finder:利用JavaScript和Google Geocode API实现
- AWS商业交易监控器:航线行为分析与营销策略制定
- AccessControl-4.0b6压缩包详细使用教程
- Python编程实践与技巧汇总
- 使用Sikuli和Python打造颜色求解器项目
- .Net基础视频教程:掌握GDI绘图技术
- 深入理解数据结构与JavaScript实践项目
- 双子座在线裁判系统:提高编程竞赛效率
