低成本激光测距传感器在扫地机器人中的应用
"这篇论文介绍了一种低成本的平面激光距离传感器(LDS),适用于室内机器人系统,特别是扫地机器人,用于地图构建、定位和避障。该传感器具有3cm的精度,可在6米范围内工作,10Hz的采集频率,以及在360度扫描中的1度分辨率,而总成本不到30美元。它采用了商用现成的电子元件和定制的机械工具进行设计,以实现高效、低成本的解决方案。"
在扫地机器人领域,激光雷达(Light Detection and Ranging,简称LiDAR)是核心传感器之一,它利用激光三角测量法来确定机器人与周围环境物体之间的距离。这种技术通过发射一束红外激光,并通过接收从物体反射回来的激光信号,计算出从发射到接收的时间,进而得出距离。由于光速已知,因此可以精确计算出物体的距离。
高像素线性CCD(Charge-Coupled Device)在激光雷达中扮演着关键角色,它能捕捉反射回来的激光光束并将其转换为电信号,然后由处理单元解析这些信号以获取距离信息。线性CCD的高像素允许更精细的扫描和更高的分辨率,从而提供更准确的环境映射。
360扫地机器人和小米扫地机器人所采用的激光雷达方案,就是结合了这种激光三角定位法和高像素线性CCD的低成本设计。这种设计的优势在于,能够在保持高精度的同时,降低设备的制造成本,使得消费者能够以更低的价格购买到具有先进导航功能的扫地机器人。
激光雷达的性能参数如3cm的精度、6米的工作范围和10Hz的采样率,意味着机器人可以快速且准确地识别和避开家中的障碍物,如家具或电线。1度的扫描分辨率则确保了全方位环境感知,使机器人能够构建出详细的空间地图,以便于规划高效的清扫路径。
在实际应用中,这种低成本的激光雷达对于家庭用机器人平台的普及至关重要,因为它降低了机器人的生产成本,同时提高了其在复杂环境中的自主导航能力。未来,随着技术的进步,这类传感器的成本可能会进一步降低,功能将更加完善,从而推动家用机器人行业的快速发展。
The relative weight of fs is determined by the image
sensor, so we first decide on it. The image sensor should
have a short exposure time to improve ambient light
rejection (Section II.E), and a large number of pixels for
resolution of x. We chose a global-shutter CMOS sensor
with 752 pixels of resolution and a minimum shutter time
of 35μs. Each pixel is 6μm, and we expect to be able to
resolve the laser dot to within 0.1 pixel or better.
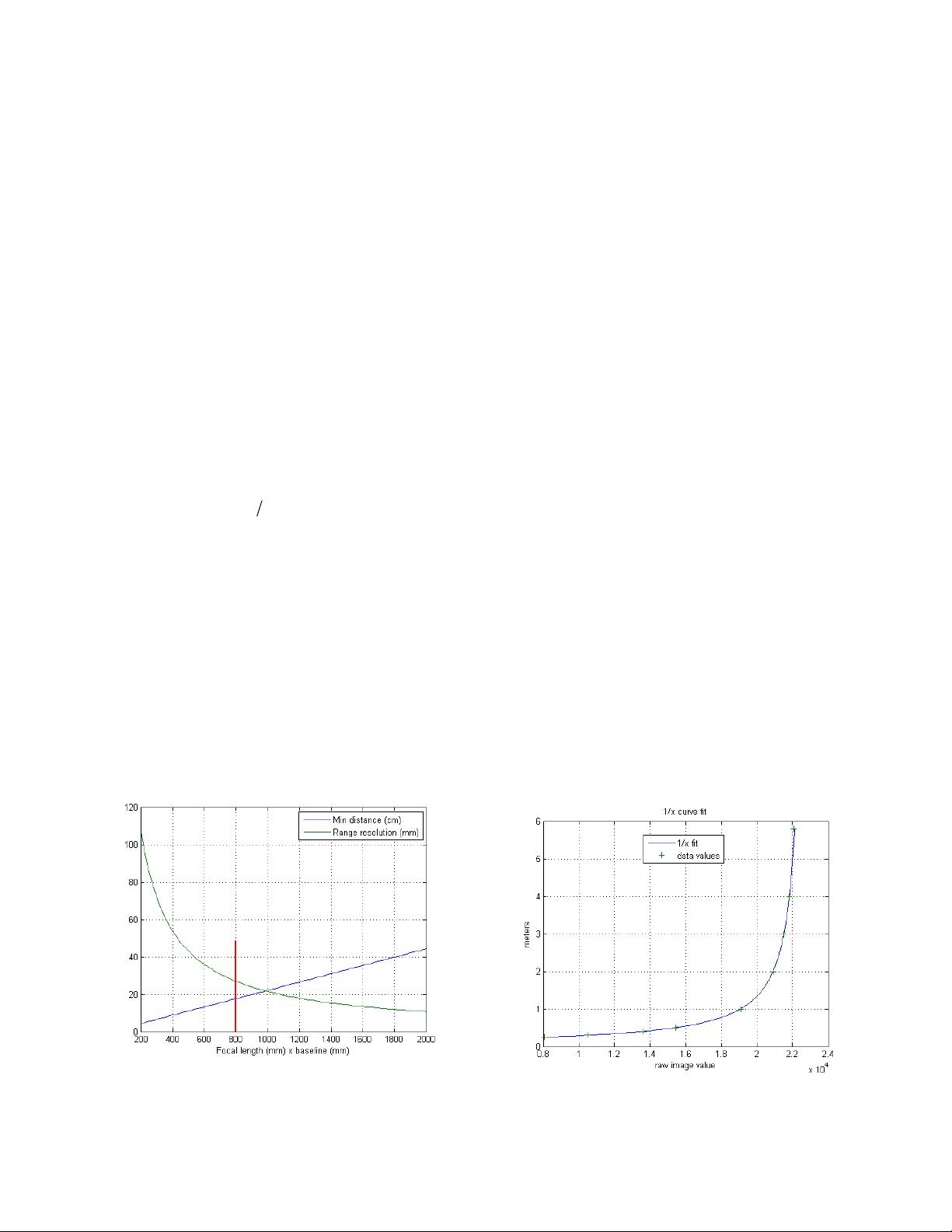
With these parameters, we can plot the effect of fs on
range resolution and min distance (Figure II-2). If the min
distance is to be 20cm or less, fs should be 900 or less. If
the range resolution is to be 30mm or less at 6m, the fs
product should be greater than 700. We pick 800 as the
“sweet spot” for the device.
The product fs = 800 can be achieved in different ways,
but the bias is towards a compact baseline, while keeping
the focal length reasonable (larger focal lengths demand
longer lenses). With a baseline of 50mm, the focal length
is 16mm, and we chose this combination.
Finally we can determine the angle β of the laser
relative to the optical axis:
o
mf 82))6*376(arctan( ≈=
μβ
(4)
C. Module Calibration
The total error of the device is a function of the device
parameters, the error in dot resolution, and the calibration
of the device. Calibration here refers to all the
misalignments that could affect the ideal operation of the
device. Because we are using low-cost optical
components, the design must account for major
inaccuracies. The main ones are laser pointing angle, lens
pointing angle, and lens distortion.
• Laser pointing angle. The laser must point vertically
in a plane parallel to the base of the device, and point
horizontally at an 8 degree angle towards the principal
ray of the camera. Low-cost laser modules have
typical pointing accuracies of at best 6 degrees. We
compensate for pointing angle mechanically, using
laser module rotation and a vertical rotation mount.
• Lens pointing angle. The diagram of Figure II-1
shows the laser beam and the lens principal ray in the
same plane. Generally this will not be the case.
Instead, in calibration we search for the horizontal
scanline that best corresponds to the laser beam at all
distances. We then use 5 scanlines above and below
this central line. If the imager is not rotated too much
relative to the plane of the laser and focal point, these
lines are sufficient to approximate the ideal planar
geometry.
• Lens distortion. For a low-cost 16mm lens, the
distortion will be at least a few percent at the edge of
field, even when optimizing for a single wavelength.
This is enough to be the major error in distant
readings, and must be compensated.
We use a two-step calibration process to deal with lens
distortion. First, we fit a 1/x curve using the following
procedure.
• Localize the laser dot image to subpixel accuracy
(Section II.D).
• For a set of readings at known distances, fit the ideal
curve of Eq. 1, weighting distant readings more
heavily. There are two parameters to be optimized:
the product fs, and the pixel offset for calculating x.
The 1/x fit yields the curve of Figure II-3. While the data
points seem to lie well on the curve, the steep slope at
larger distances means that small deviations result in large
calibration errors (Equation 3). Figure II-4 shows the
errors due only to the 1/x curve fit, at different distances.
Both the sensitivity of distance to pixel errors, and the
amount of pixel error from distortion, increase at larger
distances (towards the edge of the imager). Note that
calibration errors at distances less than 1m are less than
2mm.
Figure II-2 Min distance and Range resolution relative to fs. The design
criteria is to keep min distance less than 20cm, and range resolution less
than 40mm. The vertical line is a sweet spot.
Figure II-3 1/x calibration curve. The raw image value is the pixel value
of the centroid of the laser dot, interpolated to 1/32 pixel.
3004
Authorized licensed use limited to: Guangdong Univ of Tech. Downloaded on January 19, 2010 at 08:56 from IEEE Xplore. Restrictions apply.
剩余11页未读,继续阅读
2021-05-25 上传
2023-07-28 上传
2021-05-22 上传
2019-08-09 上传
2024-06-26 上传

Tonyhxy
- 粉丝: 6
- 资源: 27
 我的内容管理
展开
我的内容管理
展开







