PID控制算法详解与实践
需积分: 19 77 浏览量
更新于2024-09-13
收藏 534KB PDF 举报
"PIDA算法原理、调试经验与代码实现"
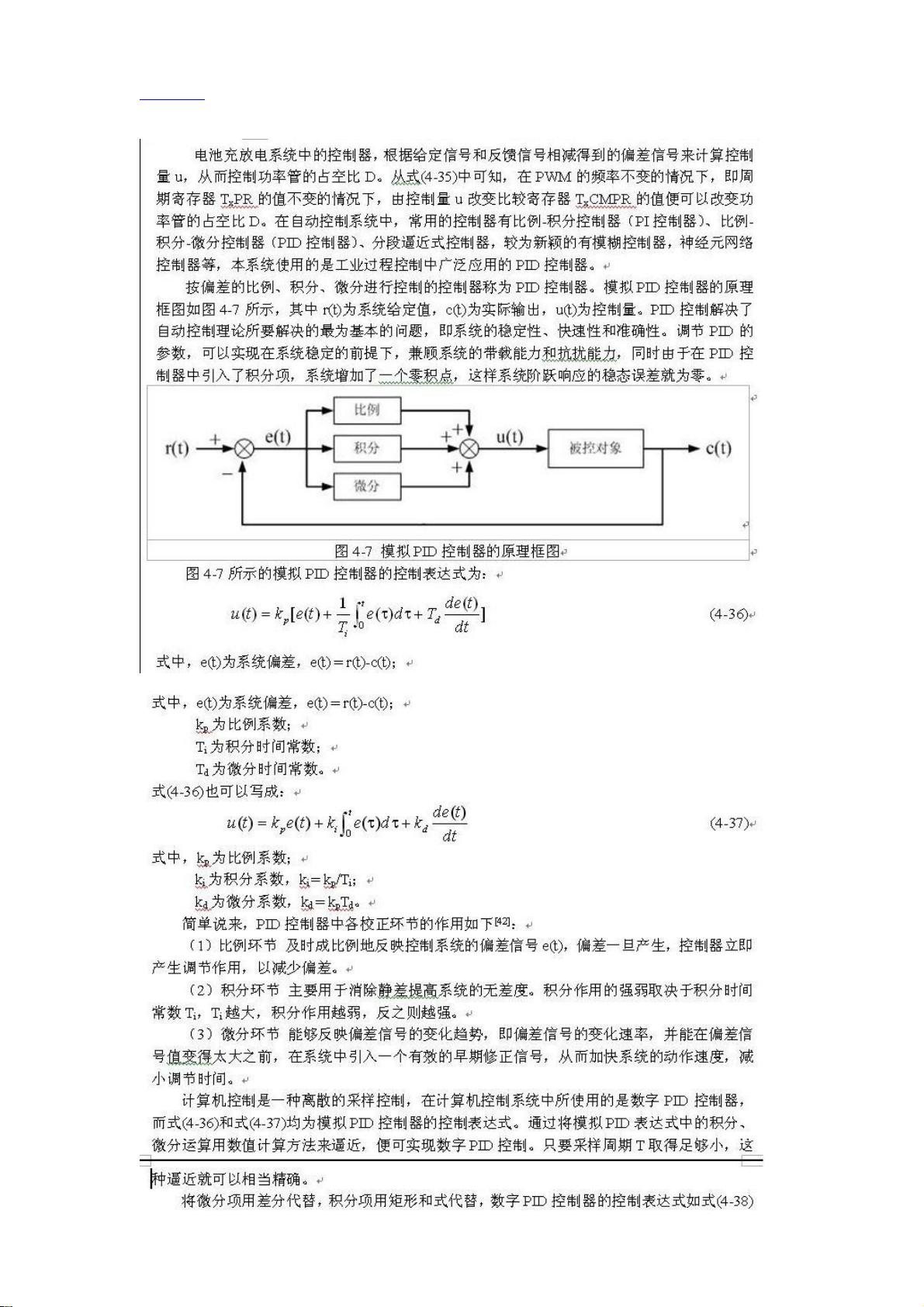
PID(比例-积分-微分)算法是自动控制理论中最常见的控制器形式,广泛应用于各种控制系统,包括机器人、自动化设备、温度控制、电机速度控制等领域。它通过结合比例、积分和微分三个部分的输出来产生一个控制信号,以减小系统误差并实现期望的动态性能。
1. **PID控制原理**:
- **比例(P)**:误差的即时比例决定了控制输出,它快速响应但可能会导致系统振荡。
- **积分(I)**:积分项基于过去的误差累积,用于消除静差,即当系统达到稳定状态时,积分项会使得控制器继续作用以减少误差至零。
- **微分(D)**:微分项是误差变化率的预测,它可以预见未来的误差趋势,从而提前进行调整,减少超调并提高系统的稳定性。
2. **PID算法流程**:
- 通常,PID控制器的算法包括计算误差(e = setpoint - process_value),然后分别计算比例、积分和微分输出。
- 比例项是Kp * e,积分项是Ki * ∑e,微分项是Kd * (de/dt)。
- 最终的控制输出U是这三个项的组合:U = Kp * e + Ki * ∑e + Kd * (de/dt)。
3. **PID代码实现**:
在提供的代码中,可以看到PID算法的C语言实现。其中,`piadjust()`函数包含了PID的核心计算逻辑,包括比例和积分部分。比例常数(Kp)、积分常数(Ki)和采样周期(T)被定义,然后计算积分项,并对控制增量(uk)进行四舍五入处理以适应硬件限制。在实际应用中,这些参数通常需要通过实验或特定方法进行调整。
4. **PID调节经验**:
- 参数选择通常采用试凑法、临界比例度法、扩充临界比例度法等。这些方法可以帮助找到初步的参数值,但往往需要迭代优化。
- 确定PID参数的步骤通常包括设定初始参数,观察系统响应,逐步调整比例、积分和微分系数,以平衡响应速度、稳定性和抑制振荡。
5. **调试技巧**:
- 通常先设置比例参数,使其足够大以获得快速响应,然后逐渐增加积分项以消除静差,最后加入微分项以改善动态响应。
- 过程中要注意防止积分饱和和振荡,可以通过限制积分项的最大值或引入积分分离点来避免。
- 实际应用中可能需要考虑死区、抗饱和等策略,以适应硬件限制和实际工况。
通过理解PID算法的基本原理、代码实现和调试经验,我们可以更有效地设计和优化控制系统,以实现预期的控制性能。在实际工程应用中,不断试验和调整参数是达到理想控制效果的关键。
PID 算法原理、调试经验以及代码
学习总结
2010-09-26 22:40:27 阅读 0 评论 0 字号:大中小 订阅
1、PID 控制原理
下载后可阅读完整内容,剩余5页未读,立即下载
2021-09-30 上传
2021-10-11 上传
2021-05-30 上传
2021-05-30 上传
2021-02-17 上传
2021-03-17 上传
2021-06-22 上传
2021-04-04 上传
2021-04-04 上传

mengjing1992
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- Fisher Iris Setosa数据的主成分分析及可视化- Matlab实现
- 深入理解JavaScript类与面向对象编程
- Argspect-0.0.1版本Python包发布与使用说明
- OpenNetAdmin v09.07.15 PHP项目源码下载
- 掌握Node.js: 构建高性能Web服务器与应用程序
- Matlab矢量绘图工具:polarG函数使用详解
- 实现Vue.js中PDF文件的签名显示功能
- 开源项目PSPSolver:资源约束调度问题求解器库
- 探索vwru系统:大众的虚拟现实招聘平台
- 深入理解cJSON:案例与源文件解析
- 多边形扩展算法在MATLAB中的应用与实现
- 用React类组件创建迷你待办事项列表指南
- Python库setuptools-58.5.3助力高效开发
- fmfiles工具:在MATLAB中查找丢失文件并列出错误
- 老枪二级域名系统PHP源码简易版发布
- 探索DOSGUI开源库:C/C++图形界面开发新篇章
