3-自由度直升机MATLAB-Simulink建模与控制器设计解析
"该资源主要介绍了如何使用MATLAB-Simulink对3-自由度直升机进行建模和仿真,包括极点配置、LQR控制、H∞控制和PID控制四种控制器的设计,以及对这些方法的优缺点进行了分析。"
在控制理论和航空工程中,3-自由度直升机模型是一个重要的研究对象,因为它的动态特性复杂,具有非线性、高阶次、强耦合等特点。在MATLAB-Simulink环境下,这种模型可以帮助研究人员和工程师更好地理解和设计飞行控制系统。
首先,极点配置方法是通过调整系统传递函数的极点位置,以改善系统动态性能的一种控制策略。在3-自由度直升机的模型中,极点配置可以使系统响应更快、更稳定,但需要精确的系统模型和适当的极点选择。
其次,LQR(Linear Quadratic Regulator)控制是一种基于状态反馈的最优控制方法,目标是最小化一个性能指标,通常是系统的能量消耗。加入内模可以增强LQR的跟踪能力和抗干扰性能,使其在实际应用中更具优势。然而,LQR方法依赖于系统的线性化模型,对于非线性强的直升机系统可能会有局限性。
接着,H∞控制是一种考虑干扰抑制的控制策略,旨在设计控制器使系统的闭环增益在所有频率下不超过某一设定值,从而增强系统的鲁棒性。在直升机系统中,H∞控制可以有效应对不确定性,但设计过程相对复杂。
最后,PID(Proportional-Integral-Derivative)控制是最常见的控制策略之一,易于实现且对系统模型的要求较低。尽管PID控制器简单,但在处理非线性和耦合问题时可能需要多次调整参数,才能达到满意的控制效果。
在MATLAB-Simulink中,通过建立直升机的数学模型,可以分别对这四种控制策略进行仿真,分析它们的性能。通过仿真结果,可以对比不同控制方法在稳定性、跟踪精度、抗干扰能力等方面的差异,为实际的直升机控制系统设计提供参考。
本资源提供了3-自由度直升机建模和控制器设计的详细步骤,不仅涵盖了理论知识,还结合MATLAB-Simulink工具进行了实践操作,是学习和研究直升机控制系统的宝贵资料。通过深入理解这些内容,读者能够掌握如何利用现代控制理论解决复杂飞行器控制问题的方法。

7
不稳定的,需要进行状态反馈加以校正。对原系统利用 MATLAB 软件的 SIMULINK
仿真图(图 2.1)可以得到不稳定的的结果。
图 2.1 系统的 simulink 仿真图
图 2.2 状态方程设定参数
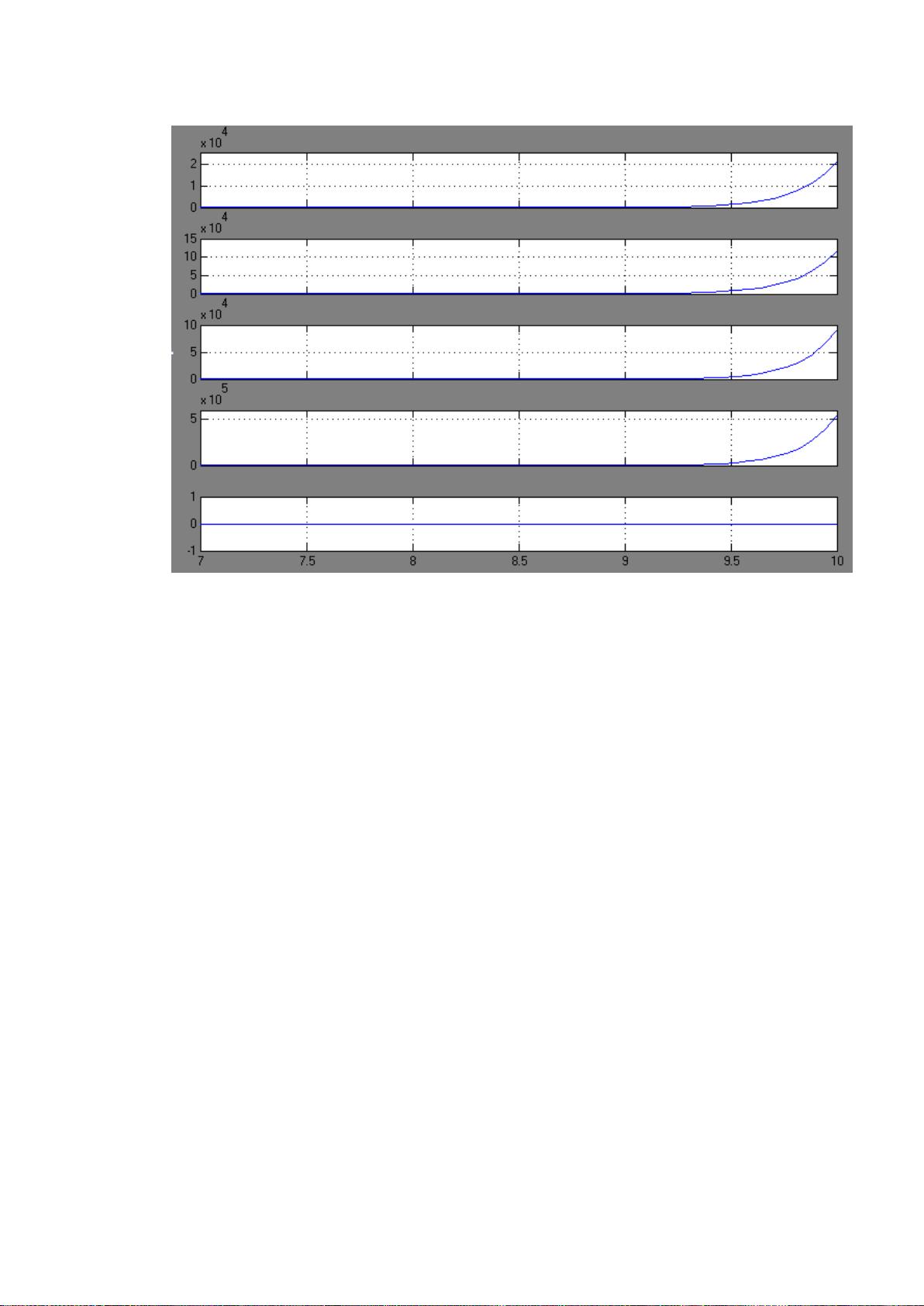
原系统的的 5 个输出如图 2.3 所示:
剩余35页未读,继续阅读
2022-07-14 上传
2023-03-01 上传
2024-01-22 上传
2024-04-20 上传
2021-03-24 上传
2024-06-25 上传
点击了解资源详情

王北先森
- 粉丝: 1
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- Study-Circle:这个跨平台的应用程序是使用Flutter制作的,它可能会起到连接社会学习和共同成长的作用
- 一个简易的智能聊天机器人系统.zip
- MiniChickenFolkloric:TCC-UFAM 2020
- matlab心线代码-Multi-Agent-Navigation:多个代理的免费导航
- Whereby-crx插件
- Windows-NT-Native-API.zip_Windows编程_C/C++_
- the-white-rabbit:White Rabbit是基于Kotlin协程的异步RabbitMQ(AMQP)客户端
- 2Ring Extension for Cisco Finesse v4.1.1-crx插件
- 下一个示例会计笔记本
- Design_Park.rar_CAD_Windows_Unix_
- 瑞金医院MMC人工智能辅助构建知识图谱大赛.zip
- skillfactory
- 课程设计之基于HTML+CSS的网页设计.rar
- jokeapp:Spring5Framwork开玩笑的应用程序
- Monster Cards-crx插件
- 完全以SwiftUI编写的带有滑动手势的入门/滑动器。-Swift开发
