单容水箱液位控制设计与PID算法应用
象——单容水箱模型
单容水箱液位控制系统主要由水箱、传感器、控制器和执行机构(如出水阀门)组成。水箱作为被控对象,其液位变化受进水、出水流量的影响。在建模过程中,假设水箱内部无搅拌,液体流动无阻力,且水箱体积恒定,这样简化后的模型称为单容水箱模型。通过分析进水流量和出水流量的关系,可以建立液位动态变化的微分方程。
三、PID控制原理
PID(比例-积分-微分)控制器是工业控制中最常用的控制算法,由比例(P)、积分(I)和微分(D)三个部分组成。P项负责快速响应误差,I项负责消除静态误差,D项则用于预测并减少系统超调。PID控制器的输出是这三个项的加权和,通过调整三个参数Kp(比例增益)、Ki(积分时间常数)和Kd(微分时间常数),可以达到理想的控制效果。
四、增量式PID算法的选择
在实际应用中,由于计算资源和实时性的限制,往往会选择增量式PID算法。相比于传统的连续PID,增量式算法仅需计算误差的变化量,减少了计算量,更适合于嵌入式系统。此外,增量式算法还具有抗饱和、抗积分积累的优点,有利于系统的稳定运行。
五、基于Visual Basic的PID液位控制界面与程序
利用Visual Basic编程语言,可以构建用户友好的人机交互界面,用于显示液位控制的实时数据和控制参数。同时,可以编写PID算法程序,实现液位控制的逻辑运算。通过接口,程序接收传感器的液位信号,根据PID算法计算出控制信号,然后输出至执行机构,调整出水阀门的开度,从而控制水位变化。
六、系统仿真与参数整定
在设计完成后,通常会进行系统仿真来检验控制策略的性能。通过改变设定值,观察系统响应,对比仿真曲线和实际运行曲线,可以评估PID参数的合理性。参数整定是关键步骤,需要反复试错,通过Ziegler-Nichols法则或自整定算法找到最优参数组合,以实现系统的快速响应、低超调和良好的稳态性能。
七、结论
单容水箱液位控制系统的成功设计,展示了PID控制在过程控制中的实用性。通过合理选择控制算法和参数整定,可以实现精确、稳定的液位控制,提高生产效率,降低操作风险。同时,基于Visual Basic的模拟界面和算法程序,使得控制系统更加直观易用,为实际工程应用提供了便利。
单容水箱液位控制系统的设计
摘要:本文根据液位系统过程机理,建立了单容水箱的数学模型。介绍了 PID 控制的基本原
理及数字 PID 算法,并根据算法的比较选择了增量式 PID 算法。建立了基于 Visual Basic 语
言的 PID 液位控制模拟界面和算法程序,进行了系统仿真,并通过整定 PID 参数,同时得出
了整定后的仿真曲线和实际曲线。
关键字:单容水箱,水箱建模,液位控制,PID 算法,增量式 PID
一、前言
过程控制是自动技术的重要应用领域,它是指对液位、温度、流量等过程
变量进行控制,在冶金、机械、化工、电力等方面得到了广泛应用。尤其是液
位控制技术在现实生活、生产中发挥了重要作用,比如,民用水塔的供水,如
果水位太低,则会影响居民的生活用水;工矿企业的排水与进水,如果排水或
进水控制得当与否,关系到车间的生产状况;锅炉汽包液位的控制,如果锅炉
内液位过低,会使锅炉过热,可能发生事故;精流塔液位控制,控制精度与工
艺的高低会影响产品的质量与成本等。在这些生产领域里,基本上都是劳动强
度大或者操作有一定危险性的工作性质,极容易出现操作失误,引起事故,造
成厂家的的损失。可见,在实际生产中,液位控制的准确程度和控制效果直接
影响到工厂的生产成本、经济效益甚至设备的安全系数。所以,为了保证安全
条件、方便操作,就必须研究开发先进的液位控制方法和策略。
在本设计中以液位控制系统的水箱作为研究对象,水箱的液位为被控制量,
选择了出水阀门作为控制系统的执行机构。针对过程控制试验台中液位控制系
统装置的特点,建立了基于 Visual Basic 语言的 PID 液位控制模拟界面和算法程
序。虽然 PID 控制是控制系统中应用最为广泛的一种控制算法。但是,要想取
得良好的控制效果,必须合理的整定 PID 的控制参数,使之具有合理的数值。
二、单容水箱液位控制系统建模
2.1 液位控制的实现
除模拟 PID 调节器外,可以采用计算机 PID 算法控制。首先由差压传感器
检测出水箱水位;水位实际值通过单片机进行 A/D 转换,变成数字信号后,被
输入计算机中;最后,在计算机中,根据水位给定值与实际输出值之差,利用
PID 程序算法得到输出值,再将输出值传送到单片机中,由单片机将数字信号
转换成模拟信号。最后,由单片机的输出模拟信号控制交流变频器,进而控制
电机转速,从而形成一个闭环系统,实现水位的计算机自动控制。
2.2 被控对象
本设计探讨的是单容水箱的液位控制问题。为了能更好的选取控制方法和参
数,有必要知道被控对象—上水箱的结构和特性。
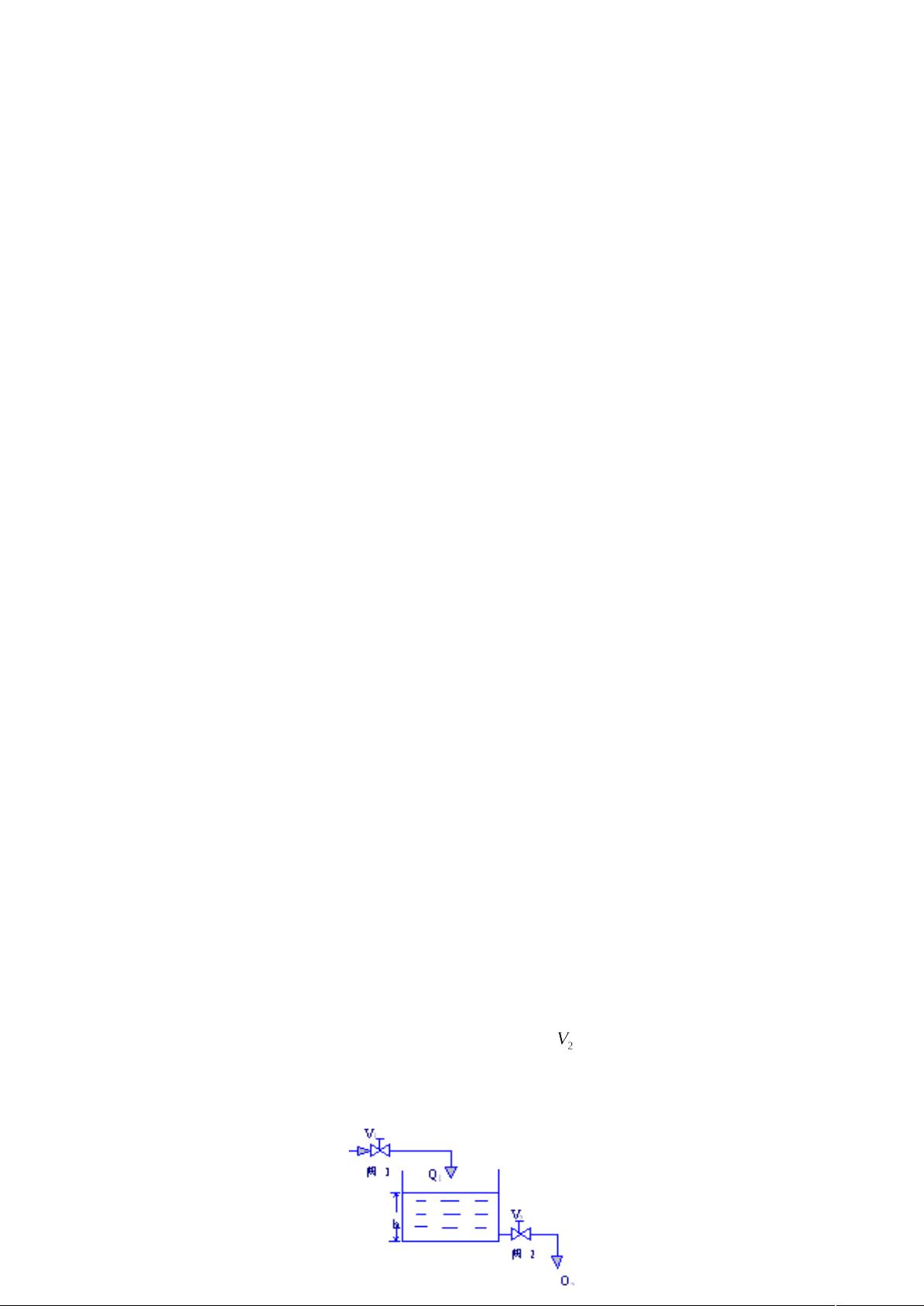
由图 2-1 所示可以知道,单容水箱的流量特性:
水箱的出水量与水压有关,而水压又与水位高度近乎成正比。这样,当水箱
水位升高时,其出水量也在不断增大。所以,若阀 开度适当,在不溢出的情
况下,当水箱的进水量恒定不变时,水位的上升速度将逐渐变慢,最终达到平
衡。由此可见,单容水箱系统是一个自衡系统。
下载后可阅读完整内容,剩余8页未读,立即下载
点击了解资源详情
130 浏览量
点击了解资源详情
2025-03-02 上传
2021-09-20 上传
312 浏览量
136 浏览量
2025-01-06 上传

lanzhen
- 粉丝: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- 初学者入门必备!Visual C++开发的连连看小程序
- C#实现SqlServer分页存储过程示例分析
- 西门子工业网络通信例程解读与实践
- JavaScript实现表格变色与选中效果指南
- MVP与Retrofit2.0相结合的登录示例教程
- MFC实现透明泡泡效果与文件操作教程
- 探索Delphi ERP框架的核心功能与应用案例
- 爱尔兰COVID-19案例数据分析与可视化
- 提升效率的三维石头制作插件
- 人脸C++识别系统实现:源码与测试包
- MishMash Hackathon:Python编程马拉松盛事
- JavaScript Switch语句练习指南:简洁注释详解
- C语言实现的通讯录管理系统设计教程
- ASP.net实现用户登录注册功能模块详解
- 吉时利2000数据读取与分析教程
- 钻石画软件:从设计到生产的高效解决方案
