Matlab 2015双目摄像头标定:参数解析与应用
需积分: 50 179 浏览量
更新于2024-09-10
收藏 154KB DOCX 举报
"Matlab 2015用于双目标定参数,涉及摄像头的内部参数、相对位置参数、畸变校正等关键要素。"
在计算机视觉领域,双目标定参数是实现立体视觉和3D重建的重要步骤。Matlab 2015 提供了强大的工具来处理这一过程。双目标定不仅包括每个单个摄像头的内部参数标定,还涉及到两个摄像头之间的相对位置关系,即右摄像头相对于左摄像头的旋转矩阵(R)和平移向量(T)。
内部参数通常包括相机的内核矩阵(Intrinsic Matrix),径向畸变系数(Radial Distortion)和切向畸变系数(Tangential Distortion)。内核矩阵描述了摄像头的焦距f和成像平面的原点(cx, cy),而畸变系数则用于校正由于镜头光学特性或装配误差导致的图像失真。径向畸变由k1, k2, k3三个参数控制,切向畸变由p1, p2两个参数决定。在实际应用中,通常只需k1和k2即可达到较好的校正效果,但为了更高的精度,可能会考虑k3及p1, p2。
标定过程通常使用棋盘格图案作为参照物,因为其有明确的几何结构,便于计算特征点。每个特征点在世界坐标系中的精确位置是已知的,通过对多个不同角度拍摄的棋盘格图像进行分析,可以计算出摄像头的内外参数。内参写入到Left/Right_Matrix.xml文件,畸变参数写入到Left/Right_dist.xml文件,注意在写入时要确保参数顺序正确,否则将导致后续处理的误差。
旋转和平移参数(RotationOfCamera2, TranslationOfCamera2)描述了两个摄像头之间的相对姿态,这对于同步捕获图像并进行立体匹配至关重要。一旦这些参数被准确地计算出来,就可以用于恢复场景的深度信息,从而实现3D重建或其他相关应用。
总结起来,Matlab 2015在双目标定参数方面提供了全面的工具和支持,涵盖了摄像头内部参数标定、相对位置估计以及畸变校正等核心环节,是进行计算机视觉研究和开发的强大平台。正确理解和运用这些参数对于优化立体视觉系统的性能至关重要。
标定参数
双目摄像头定标不仅要得出每个摄像头的内部参数,还需要通过
标定来测量两个摄像头之间的相对位置(即右摄像头相对于左摄像
头的三维平移 T 和旋转 R 参数)。
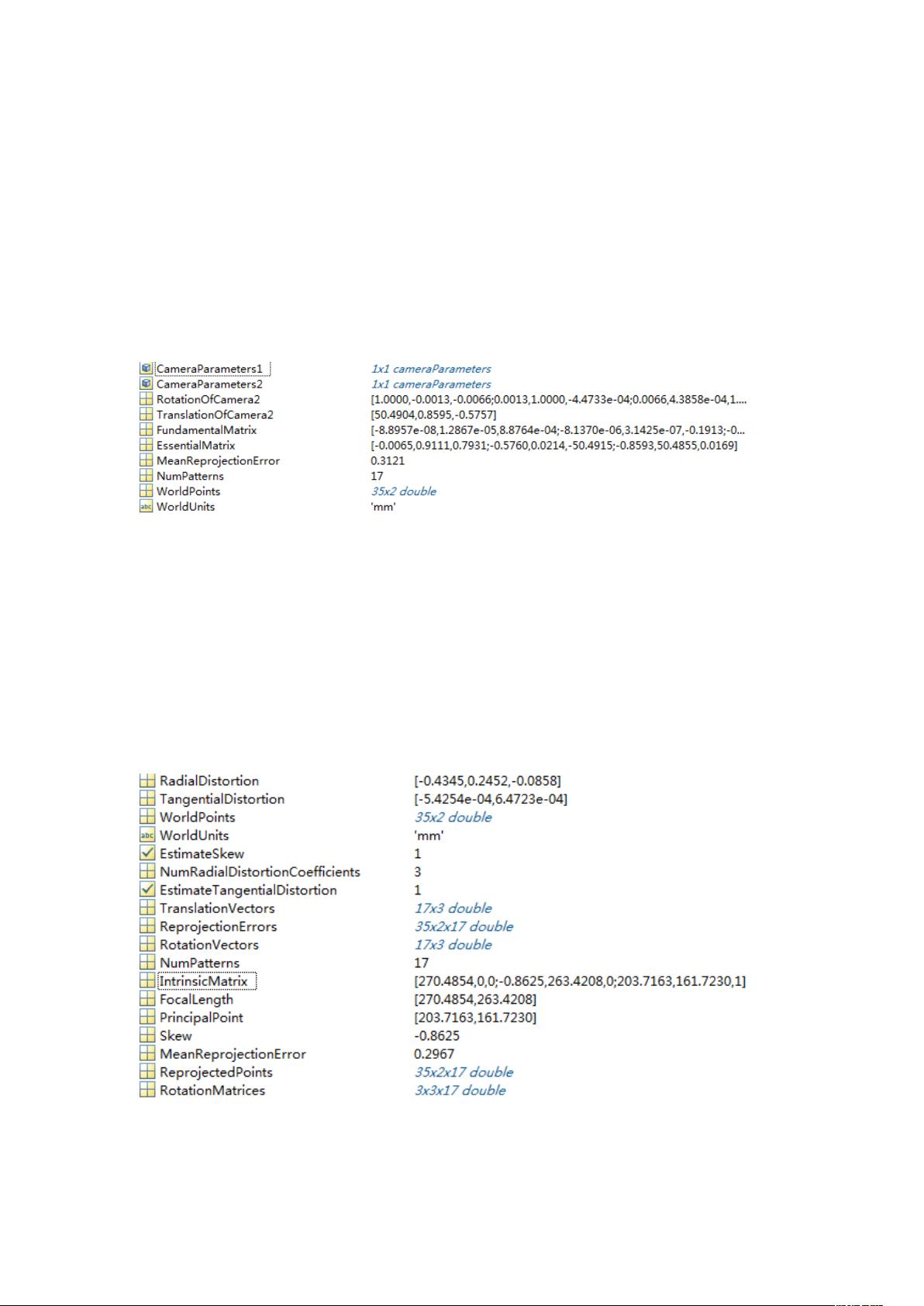
使用 Matlab2015 标定后,会得到如下标定参数:
CameraParameters1 与 CameraParameters2 为左右摄像头的内部参
数 ( 1 为 左 摄 像 头 , 2 为 右 摄 像 头 ) , RotaonOfCamera2 与
TranslaonOfCamera2 为两个摄像头的旋转、平移参数,可直接写入
到相应的 XML 文件中。
CameraParameters1 与 CameraParameters2 中包含如下文件:
我 们 主 要 使 用 IntrinsicMatrix 、 RadialDistoron 以 及
下载后可阅读完整内容,剩余3页未读,立即下载
2650 浏览量
633 浏览量
257 浏览量
105 浏览量
2121 浏览量
2121 浏览量
202 浏览量
298 浏览量

SYL0303
- 粉丝: 44
 我的内容管理
展开
我的内容管理
展开







最新资源
- 实现大视图进度条的自定义控件bigviewprogressbar
- 深入学习高级屏幕截图技术教程
- Apiton-Vue Nuxt应用模板入门与使用指南
- Python控制的智能婴儿监护机器
- ZHConverter实现中文简繁体互转技术详解
- venobo开源项目:基于Electron和React的Torrent流应用
- C语言实现Huffman编码文本压缩与解压缩技术
- 战斗力客户服务工单管理系统的实用功能与优势
- 个性化倒计时显示:支持时分秒与分秒毫秒
- Chrome扩展Multimedia Search:高效多格式文件搜索
- Karate DSL框架的介绍与Gherkin标签应用
- 基于OpenCV3.4.1的Android人脸静态识别技术
- 程序意外退出时自动保存与恢复文件技术解析
- 快速部署Redis MASTER实例的Shell脚本教程
- AutoHotkey v1.1.13.01中文帮助文档更新详情
- iOS自定义PageControl实现与应用
