精密SAR ADC前端放大器与RC滤波器设计策略
本文主要探讨了在精密模拟数字转换器(SAR ADC)中,前端放大器和RC滤波器的设计要点,特别是在AD转换过程中至关重要的AD(模数转换)前端部分。作者Alan Walsh在《Analog Dialogue》第46卷第12期(2012年12月)中详细阐述了这一主题。
首先,前端电路包括两个关键组件:驱动放大器和RC滤波器。驱动放大器的作用是预处理输入信号,它不仅负责将模拟信号转换为低阻抗形式以减少信号源与ADC输入之间的干扰,而且还确保信号强度适中,以便AD转换过程能够有效地进行。
RC滤波器在前端电路中的作用至关重要。它作为一个低通滤波器,主要任务是过滤掉输入信号中的高频噪声,保持信号的纯净度,从而提高ADC的转换精度。通过精心选择合适的电阻(R)和电容(C),可以有效抑制超出系统工作频率范围的信号,防止它们对AD转换结果造成影响。此外,RC滤波器还能够减轻ADC内部开关电容器切换时产生的瞬态电压冲击,也就是所谓的“kick”,从而进一步提升系统的稳定性。
设计前端电路时,需要权衡各种因素,如信号带宽、噪声性能、转换速度以及功耗等。不同的应用可能对这些参数有不同的要求,因此在选择R和C的具体数值时,设计师需要深入理解ADC的工作原理,同时参考设备数据手册和相关文献,以确保前端电路能够满足系统的特定需求。
总结来说,这篇文章提供了关于如何设计高效且精确的AD转换前端电路的实用指导,特别是针对驱动放大器和RC滤波器的选择和配置。这对于电子工程师在实际项目中优化模数转换性能,实现高分辨率、低噪声和低功耗的系统设计具有重要参考价值。
Analog Dialogue 46-12, December (2012) 1
Front-End Amplier and
RC Filter Design for a
Precision SAR Analog-to-
Digital Converter
By Alan Walsh
Successive-approximation (SAR) ADCs offer high resolution,
excellent accuracy, and low power consumption. Once a particular
precision SAR ADC has been chosen, system designers must deter-
mine the support circuitry needed to obtain the best results. The
three principal areas to consider are the front end, which interfaces
the analog input signal to the ADC, the voltage reference, and the
digital interface. This article focuses on the circuit requirements
and trade-offs in designing the front end. Useful information on
the other areas, which are device- and system-specic, can be
found in data sheets—and in this article’s references.
The front end consists of two parts: the driving amplier and the
RC lter. The amplier conditions the input signal—as well as
acting as a low-impedance buffer between the signal source and
the ADC input. The RC lter limits the amount of out-of-band
noise arriving at the ADC input and helps to attenuate the kick
from the switched capacitors in the ADC’s input.
Choosing the right amplier and RC lter for a SAR ADC
can be a challenge, especially when the application needs to
differ from the routine data sheet usage of the ADC. Looking
at the various application factors that inuence amplier and
RC choice, we provide design guidelines that lead to the best
solution. Major considerations include input frequency, throughput,
and input multiplexing.
Selecting a Suitable RC Filter
To select a suitable RC lter, we must calculate the RC bandwidth
for single-channel or multiplexed applications, then select values
for R and C.
Figure 1 shows a typical amplier, single-pole RC lter, and
ADC. The ADC input presents a switched-cap load to the driving
circuitry. Its 10-MHz input bandwidth means that low-noise is
needed over a wide bandwidth to get a good signal-to-noise ratio
(SNR). The RC network limits the bandwidth of the input signal
and reduces the amount of noise fed to the ADC by the amplier
and upstream circuitry. Too much band limiting will increase the
settling time and distort the input signal, however.
V
REF
C
DAC
R
EXT
C
EXT
V
PEAK
t
CONV
t
ACQ
KICK
f
IN
f
IN
Figure 1. Typical amplier, RC lter, and ADC.
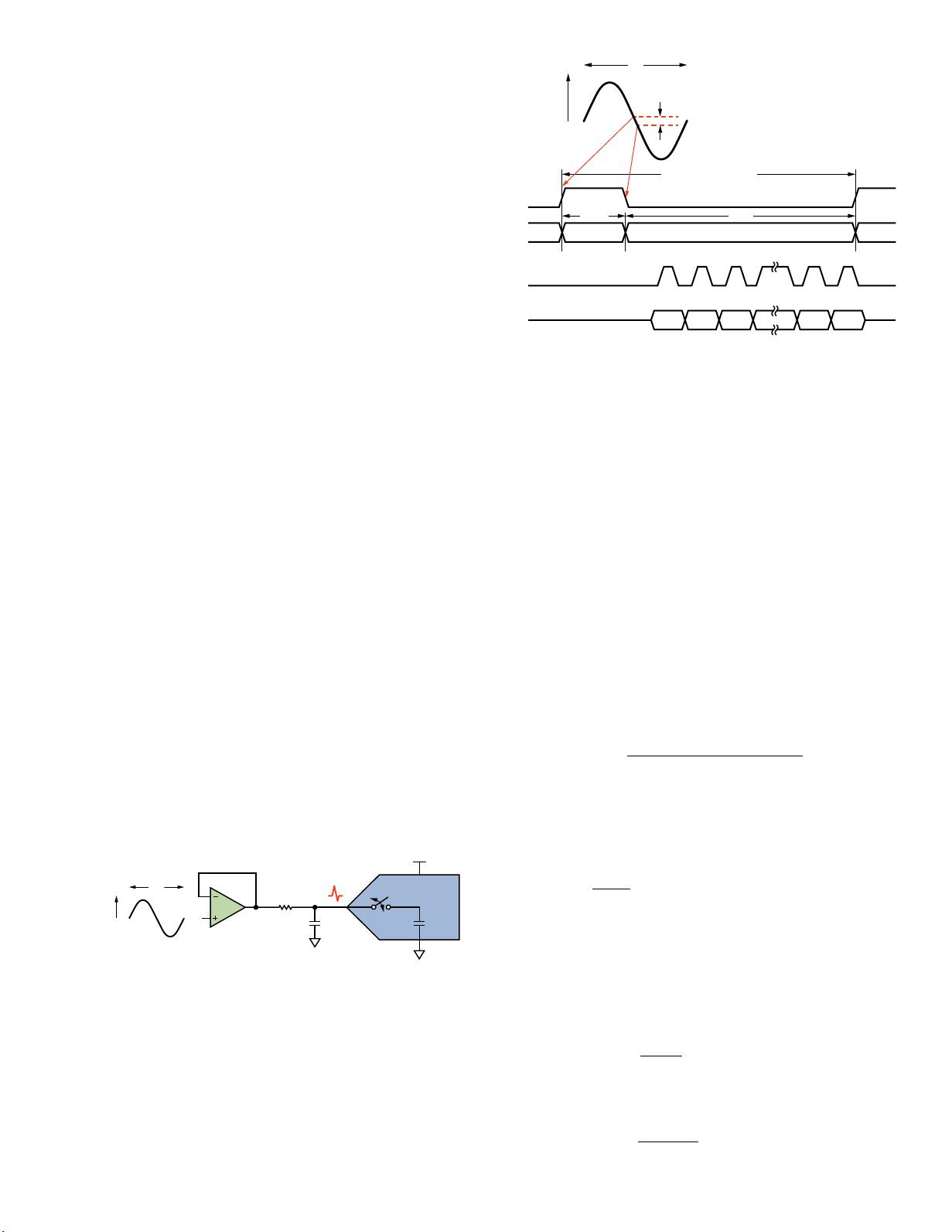
The minimum RC value needed to settle the ADC input while
also optimally band limiting the noise can be calculated assuming
exponential settling of a step input. To calculate the size of the step,
we need to know the input signal frequency, amplitude, and ADC
conversion time. The conversion time, t
CONV
(Figure 2), is when the
capacitive DAC is disconnected from the input and is performing
bit trials to generate the digital code. At the end of the conversion
time, the capacitive DAC, which holds the previous sample charge,
is switched back to the input. This step change represents how
much the input signal has changed in that time. The time taken
to settle this step is known as the reverse settling time.
www.analog.com/analogdialogue
1 2 3 N
–
2
CONVERSIONACQUISITION ACQUISITION
CNV
SCK
SDO
N
–
1 N
D
N
D
1
D
0
D
N
–
1
D
N
–
2
t
ACQ
VOLTAGE STEP
V
PEAK
f
IN
ADC THROUGHPUT t
SR
t
CONV
Figure 2. Typical timing diagram for N-bit ADC.
The maximum undistorted rate of change of a sine wave signal
with a given input frequency can be calculated as
2π f
IN
V
PEAK
If the conversion rate of the ADC is considerably higher than
the maximum input frequency, the maximum amount the input
voltage has changed during the conversion time is given by
2π f
IN
V
PEAK
t
CONV
This is the maximum voltage step that is seen by the capacitive
DAC when it is switched back to acquire mode. This step is then
attenuated by the parallel combination of the DAC’s capacitance
and that of the external capacitor. For this reason, it is important
that the external capacitor be relatively large—a few nanofarads.
This analysis will assume that the on resistance of the input switch
has a negligible effect. The step size that now needs to be settled
is given by
C
EXT
+ C
DAC
=
2π f
IN
V
PEAK
t
CONV
C
DAC
V
STEP
Next, calculate the time constant to settle the ADC input to ½ LSB
during the acquisition time of the ADC. Assuming exponential
settling of the step input, the required RC time constant, τ, is
=
τ
t
ACQ
N
TC
where t
ACQ
is the acquisition time and N
TC
is the number of
time constants required to settle. The number of time constants
required can be calculated from the natural logarithm of the
ratio of the step size, V
ST E P
, to the settling error—which in this
case is ½ LSB,
=
2
N + 1
V
REF
V
half_lsb
giving
N
TC
= ln
V
STEP
V
half_lsb
下载后可阅读完整内容,剩余4页未读,立即下载
2019-03-02 上传
2020-04-30 上传
2019-09-20 上传
2018-05-02 上传
2023-05-10 上传
2009-08-07 上传
2021-10-02 上传

zwm96101
- 粉丝: 0
- 资源: 8
 我的内容管理
展开
我的内容管理
展开







最新资源
- C语言数组操作:高度检查器编程实践
- 基于Swift开发的嘉定单车LBS iOS应用项目解析
- 钗头凤声乐表演的二度创作分析报告
- 分布式数据库特训营全套教程资料
- JavaScript开发者Robert Bindar的博客平台
- MATLAB投影寻踪代码教程及文件解压缩指南
- HTML5拖放实现的RPSLS游戏教程
- HT://Dig引擎接口,Ampoliros开源模块应用
- 全面探测服务器性能与PHP环境的iprober PHP探针v0.024
- 新版提醒应用v2:基于MongoDB的数据存储
- 《我的世界》东方大陆1.12.2材质包深度体验
- Hypercore Promisifier: JavaScript中的回调转换为Promise包装器
- 探索开源项目Artifice:Slyme脚本与技巧游戏
- Matlab机器人学习代码解析与笔记分享
- 查尔默斯大学计算物理作业HP2解析
- GitHub问题管理新工具:GIRA-crx插件介绍
