肇庆市技师学院ABB机器人课程中,学生通过实际操作和学习ABB机器人的程序数据来掌握程序数据的建立方法、三个关键程序数据的设定以及机器人工具自动识别功能。在课程中,学生以bool为例,练习建立num、robtarget等程序数据,并设定机器人的工具数据tooldata、工件坐标wobjdata、负荷数据loaddata。通过使用LoadIdentify工具自动识别安装在六轴法兰盘上的工具和载荷的重量以及重心,学生将深入了解ABB机器人的程序数据应用。
在ABB机器人的程序数据课程之前,学生需具备一定的知识储备。他们需要了解程序数据是在程序模块或系统模块中设定的值和定义的一些环境数据,由同一个模块或其他模块中的指令进行引用。图中展示了一条常用的机器人关节运动指令MoveJ,调用了四个程序数据,其中包括robtarget(机器人运动目标位置数据)、speeddata(机器人运动速度数据)、zonedata(机器人运动转弯数据)、tooldata(机器人工作数据TCP)等。此外,程序数据还有不同的类型与分类,需要学生在课程中逐步掌握。
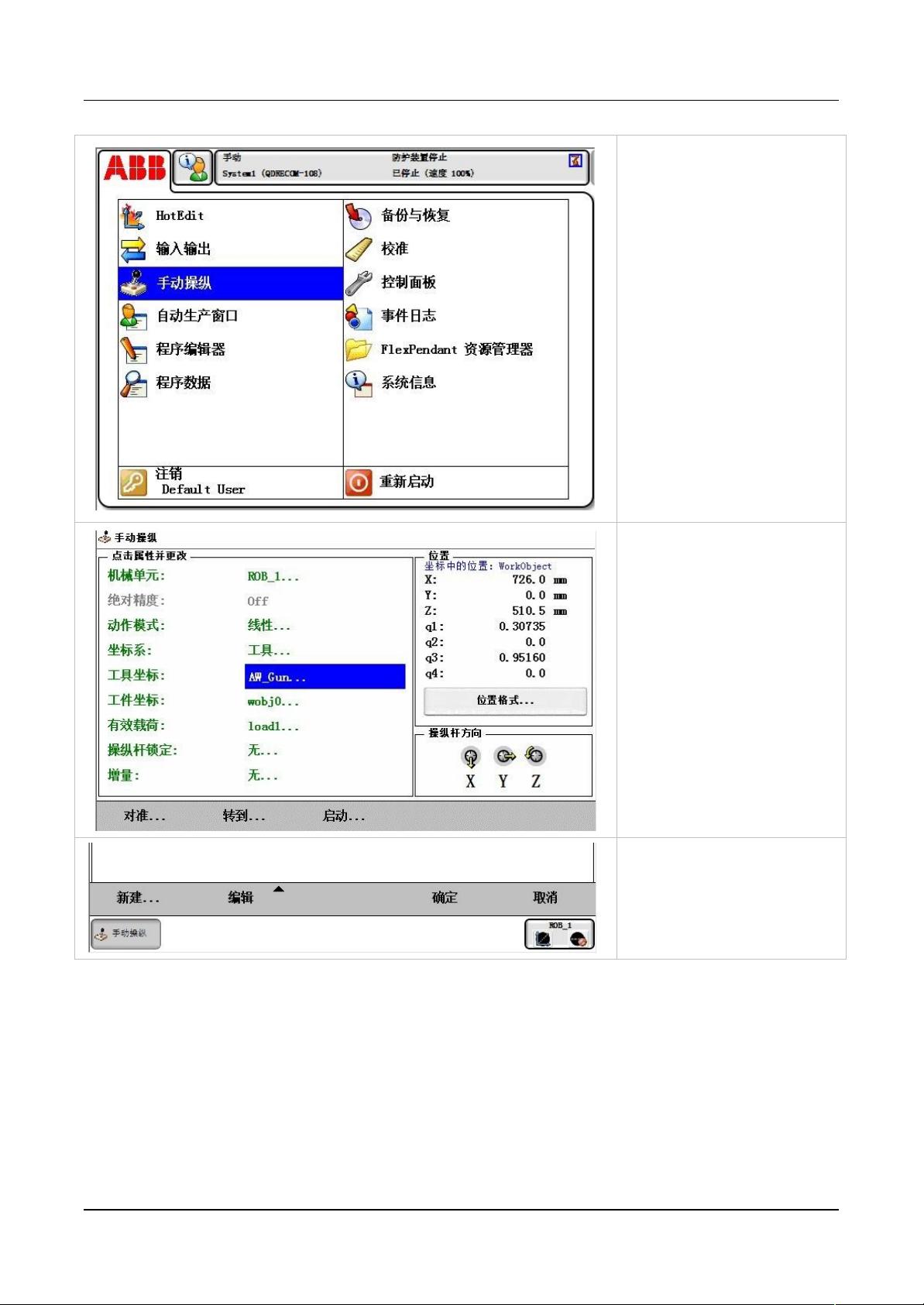
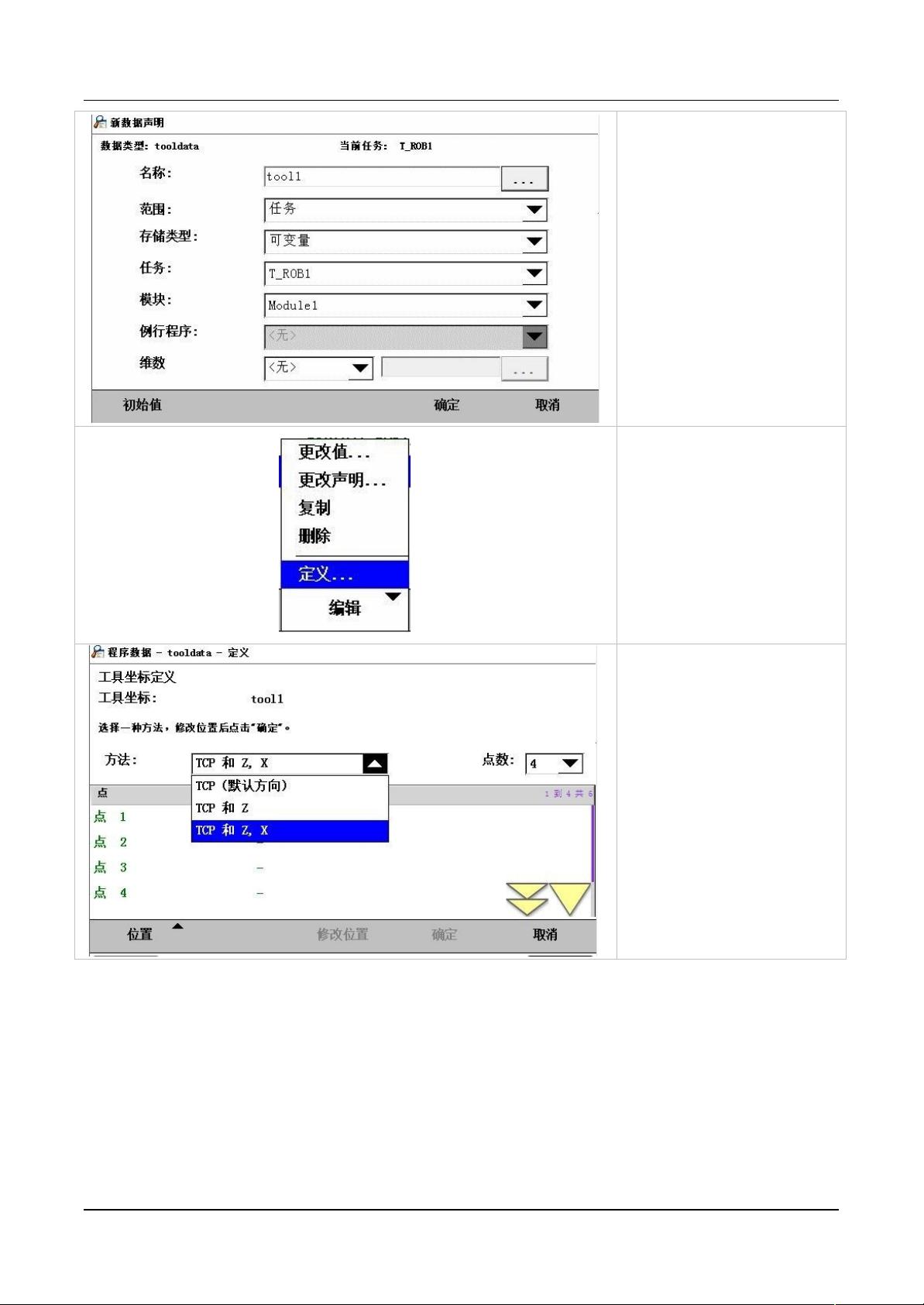
通过实际操作和练习,学生将掌握建立ABB机器人的程序数据的方法和技巧。他们将学会建立不同类型的程序数据,并充分利用这些程序数据来实现机器人的自动化操作。此外,通过设定机器人的工具数据、工件坐标和负荷数据,学生能够更加准确地控制机器人的运动轨迹和工作效率。使用LoadIdentify工具自动识别安装在六轴法兰盘上的工具和载荷的重量和重心,可以有效提高机器人的工作效率和安全性。
综上所述,肇庆市技师学院ABB机器人的程序数据课程对于学生来说是一次宝贵的学习经历。通过掌握程序数据的建立方法、关键程序数据的设定以及机器人工具自动识别功能,学生将在未来的工作中具备更好的机器人编程和操作能力。这种实践性强、技能要求高的课程将有助于培养学生在工业自动化领域的核心竞争力,为他们的职业发展打下稳固的基础。






 我的内容管理
收起
我的内容管理
收起
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助 






