TI TDA4VM PHY状态机管理机制详解
需积分: 20 41 浏览量
更新于2024-08-05
1
收藏 518KB PDF 举报
TDA4 PHY状态机管理机制
TI TDA4VM PHY状态机的状态机制是理解TI PHY工作原理的关键所在。PHY状态机管理机制是PHY Driver的一部分,负责管理PHY的生命周期,从初始化到链路建立。
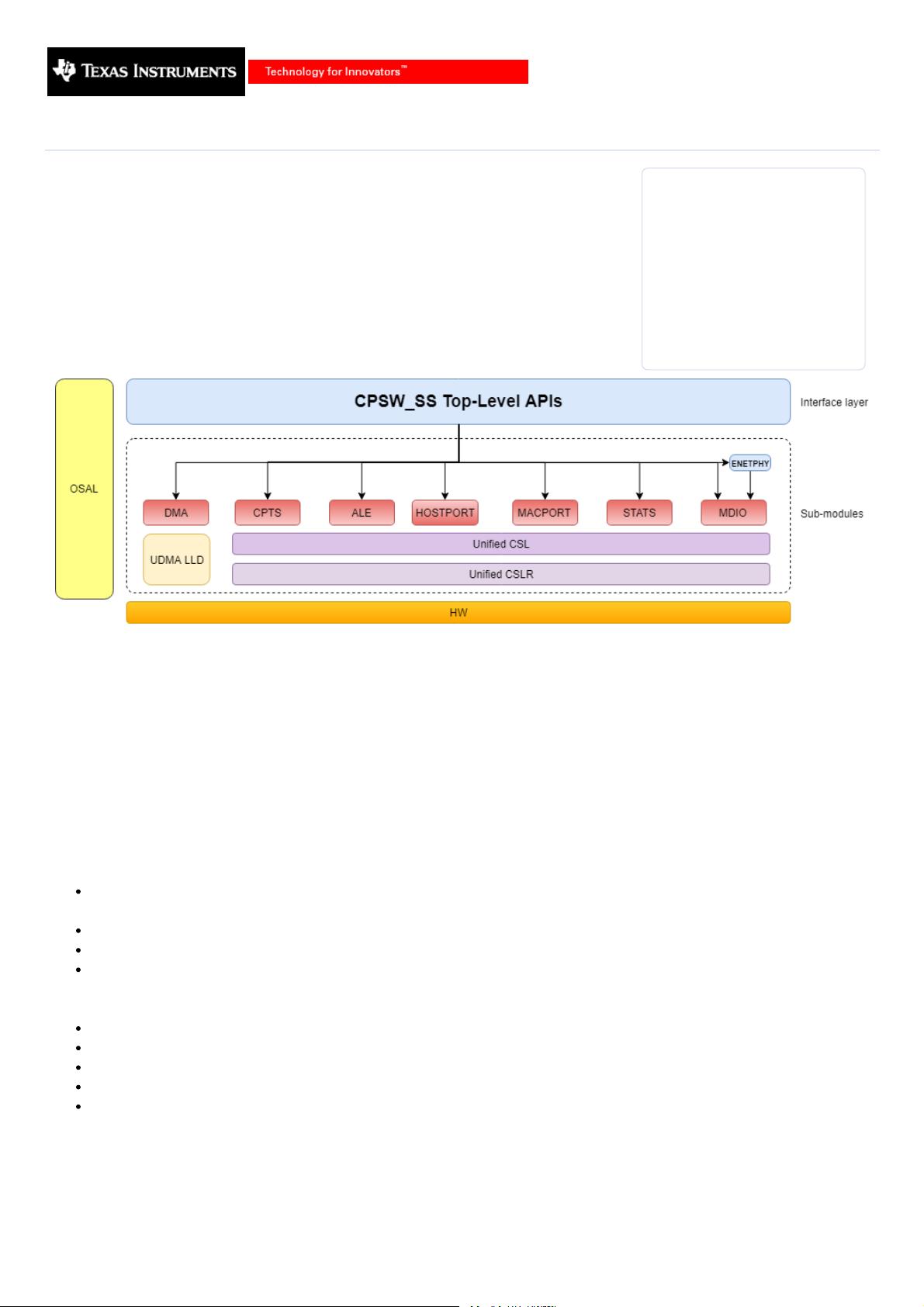
PHY Driver是CPSW低级驱动程序(LLD)的子模块,专门用于Ethernet PHY管理。它实现了状态机,处理PHY的生命周期,从初始化到链路建立。PHY子模块与MDIO子模块交互,执行操作,如检测活跃和/或链路PHY,以及PHY寄存器访问。PHY、MDIO和CPSW集成层之间的关系如图所示。
CPSW Low-Level Driver Block Diagram
当前,PHY驱动程序仅支持Clause-22设备,不支持Clause-45设备。
PHY Driver的顶层位于 `<CPSW_LLD>/src/cpsw_phy.c`,实现了基本API,以便与CPSW集成层通信,例如CpswPhy。
PHY状态机管理机制的实现涉及到多个方面:
1. PHY Driver:负责管理PHY的生命周期,从初始化到链路建立。
2. MDIO子模块:与PHY子模块交互,执行操作,如检测活跃和/或链路PHY,以及PHY寄存器访问。
3. CPSW集成层:提供了PHY Driver与CPSW Low-Level Driver之间的接口。
TI TDA4VM PHY状态机的状态机制是基于状态机的设计思想,通过状态机的状态转换来管理PHY的生命周期。
状态机的状态转换可以分为以下几个阶段:
1. 初始化阶段:PHY Driver初始化PHY,准备进行链路建立。
2. 链路建立阶段:PHY Driver与MDIO子模块交互,执行操作,如检测活跃和/或链路PHY,以及PHY寄存器访问。
3. 链路维持阶段:PHY Driver维持链路的稳定运行,监控PHY的状态。
4. 错误处理阶段:PHY Driver处理PHY错误,恢复链路的稳定运行。
TI TDA4VM PHY状态机的状态机制是PHY Driver的核心组件,负责管理PHY的生命周期,从初始化到链路建立。该机制的实现涉及到PHY Driver、MDIO子模块和CPSW集成层之间的交互,确保PHY的稳定运行。
本文档提供了TI TDA4VM PHY状态机的状态机制的详细介绍,帮助读者理解TI PHY的工作原理。
2021/4/28
PHY Integration Guide
software-dl.ti.com/jacinto7/esd/processor-sdk-rtos-jacinto7/06_01_01_12/exports/docs/pdk/packages/ti/drv/cpsw/docs/doxygen/html/cpsw_phy_g
…
1/6
Table of Contents
Introduction
PHY Driver
Device-Specific Drivers
PHY to Driver Binding
Implementing a New PHY
Driver
Appendix
Appendix A
PHY Integration Guide
Introduction
The PHY driver is a submodule of the CPSW low-level driver (LLD) dedicated to Ethernet PHY
management. It implements a state machine required to handle the lifecycle of PHYs, from
initialization to link establishment.
The PHY submodule interacts with the MDIO submodule to perform operations like detecting
alive and/or linked PHYs, and for PHY register accesses. The relationship between PHY, MDIO
and CPSW integration layer is shown below.
CPSW Low-Level Driver Block Diagram
Currently, the PHY driver supports only Clause-22 devices. Clause-45 devices are not supported.
PHY Driver
The top-layer of PHY driver is located at <CPSW_LLD>/src/cpsw_phy.c. This layer implements the basic APIs that are needed to
communicate with the CPSW integration layer, namely CpswPhy_open(), CpswPhy_ioctl() and CpswPhy_close().
The CPSW_LLD is capable of supporting multiple PHYs running simultaneously; each PHY has its own driver instance, its own state
machine and hence will follow independent lifecycle from other PHYs.
The lifecycle of the PHYs is handled by the PHY driver via a state machine implementation. This state machine is composed of the
following states:
FINDING: The driver will remain in this state until the PHY is detected as alive and a device-specific PHY driver has been bound to
it.
FOUND: The driver will initiate (soft) reset if requested in PHY configuration.
RESET_WAIT: The driver will remain in this state while waiting for reset to complete.
ENABLE: The driver will put the PHY in normal mode, perform PHY device-specific extended configuration and get common
capabilities supported by SoC, CPSW MAC port and local PHY device. Depending on the requested mode (auto-negotiation or
manual), the PHY will either restart auto-negotiation or manually configure speed and duplexity.
LOOPBACK: Last state if PHY loopback is enabled.
NWAY_START: The driver will remain in this state while waiting for auto-negotiation to start.
NWAY_WAIT: The driver will remain in this state while waiting for auto-negotiation to complete.
LINK_WAIT: The driver will remain in this state while waiting for link up.
LINKED: The PHY will remain in this state until the link is down, i.e. cable disconnection.
The diagram in the figure below provides a simplified view of the state transitions of the PHY state machine.
下载后可阅读完整内容,剩余5页未读,立即下载
2022-06-02 上传
2023-05-02 上传
2024-10-30 上传
2022-10-14 上传
2020-07-29 上传
2023-01-30 上传
点击了解资源详情
点击了解资源详情
2023-11-11 上传

大侠课堂
- 粉丝: 100
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular实现MarcHayek简历展示应用教程
- Crossbow Spot最新更新 - 获取Chrome扩展新闻
- 量子管道网络优化与Python实现
- Debian系统中APT缓存维护工具的使用方法与实践
- Python模块AccessControl的Windows64位安装文件介绍
- 掌握最新*** Fisher资讯,使用Google Chrome扩展
- Ember应用程序开发流程与环境配置指南
- EZPCOpenSDK_v5.1.2_build***版本更新详情
- Postcode-Finder:利用JavaScript和Google Geocode API实现
- AWS商业交易监控器:航线行为分析与营销策略制定
- AccessControl-4.0b6压缩包详细使用教程
- Python编程实践与技巧汇总
- 使用Sikuli和Python打造颜色求解器项目
- .Net基础视频教程:掌握GDI绘图技术
- 深入理解数据结构与JavaScript实践项目
- 双子座在线裁判系统:提高编程竞赛效率
