

第一章 绪论
7
理的改进方案,并充分分布式雷达中的多站点优势,明显地提高了目标在干扰抑
制后的信噪比。针对距离-速度联合欺骗干扰,首先对目标的真实性不加区分,通
过对接收到的信号进行多普勒处理,得到它们的距离和多普勒信息,在经过时间
校准并转换到同一坐标系下,干扰的多普勒由干扰机调制产生,所以各个节点雷
达的多普勒信息应近似相等,而且干扰相对于目标在距离单元也应有近似相等的
时延;而对于目标,其对各节点雷达的径向分速度互不相同,这就决定了目标对
于各站点的多普勒信息互不相等,基于以上两点,我们提出了基于速度和距离信
息检测的干扰抑制算法。
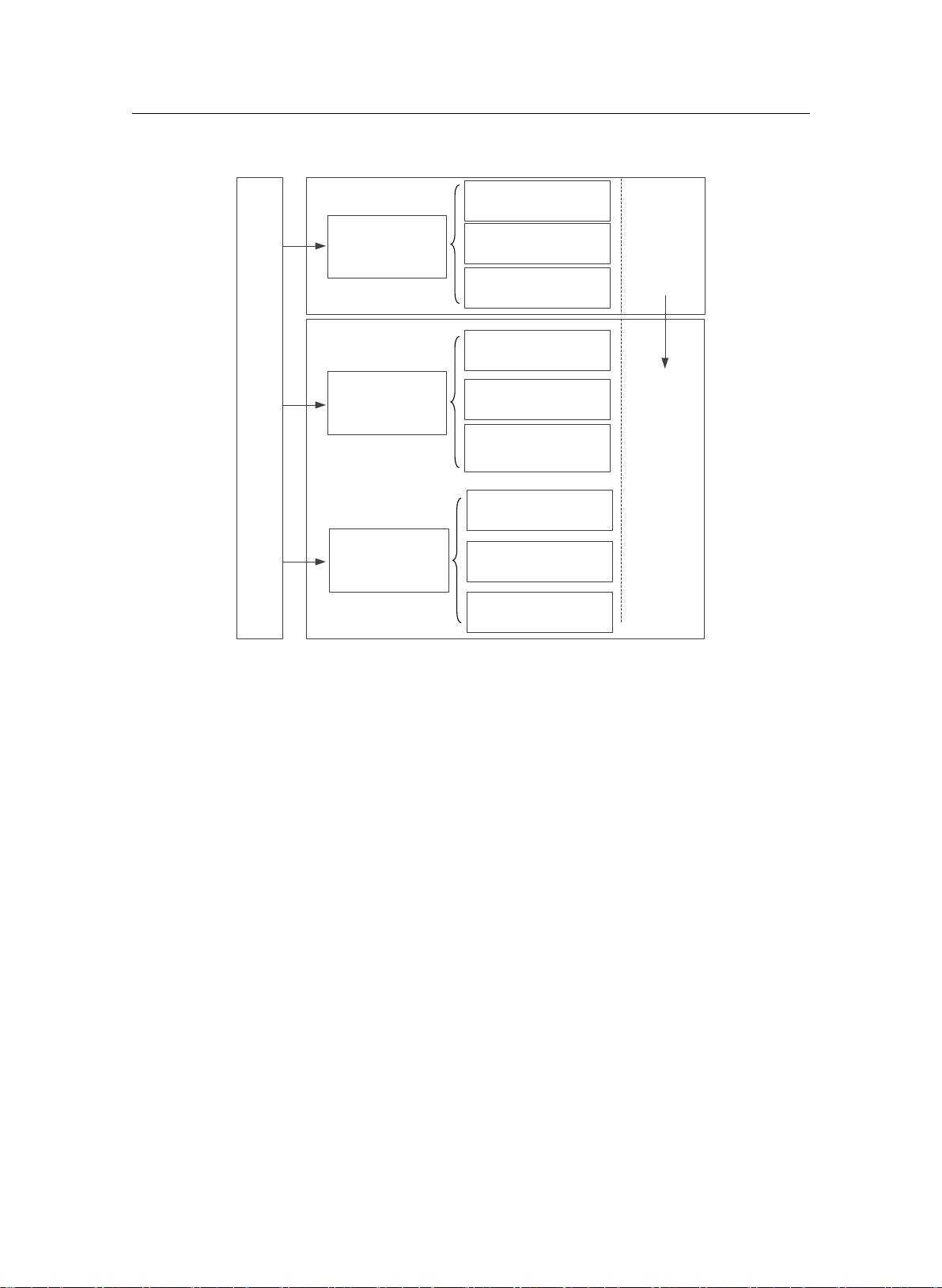
本论文的结构安排如图 1-1 所示,具体内容为:
第一章:绪论。
主要介绍了目前国内外对于压制干扰以及欺骗干扰在分布式雷达系统中抑制
的研究现状。在现代战争情态下,研究分布式雷达抗干扰的背景和意义。为本文
的工作的展开做了引子。
第二章:常见雷达有源干扰建模。
主要内容包括了噪声调幅干扰、距离欺骗干扰、距离-速度联合欺骗干扰的数
学模型的建立。与此同时,我们还介绍了与干扰类型相关的基本性质与产生机理。
并用仿真与框图的形式展示了干扰效果和流程,对于特定的干扰类型,我们还探
讨了其统计意义,包含相关函数与均值等。
第三章:基于分布式雷达的抗压制式干扰算法。
首先,我们研究了已有的单站噪声调幅干扰消除算法,通过详细的推导和分
析,指出了这一算法的局限性和缺陷,针对其对干扰载频和信号载频的强制要求,
以及采样率不能满足条件的限制,提出了改进的噪声调幅干扰时域抑制算法。新
的算法适用范围更加广泛,而且对采样率没有苛刻的要求,仿真验证这一算法的
有效性。最后,基于分布式雷达系统,在单站完成干扰抑制后通过多站点信息融
合,提高了目标的信噪比。
第四章:基于分布式雷达的距离-速度联合欺骗干扰抑制算法
首先我们确定了在分布式雷达系统中联合欺骗干扰的数学模型,然后讨论雷
达对目标进行二维处理以同时获得目标的距离和速度信息的过程,在二维处理后,
又进一步讨论了如何从距离-多普勒平面获得多目标的距离和速度坐标。其次,在
获得上述信息后,利用干扰调制多普勒的特征,对真假目标的属性作第一次甄别,
最后,利用假目标的距离维特征作第二次的判断,最终确定假目标。
第五章:总结与展望。
本章对全文的工作进行了总结性的回顾,针对已有工作的不足,并考虑最近
万方数据

剩余69页未读,继续阅读















