改进的PID控制器抗饱和策略:兼顾不同死区时间的高效工业应用
需积分: 15 2 浏览量
更新于2024-09-08
收藏 118KB PDF 举报
本文主要探讨了一种改进的抗饱和策略,用于增强比例积分微分(PID)控制器的性能。PID控制器在工业控制中占据主导地位,但实际应用中,由于执行器饱和问题,其性能往往会受到严重影响。作者提出了一种结合了回溯计算与条件积分的抗饱和方案,旨在解决先前方法中存在的局限性。
传统的PID控制器在处理系统非线性和饱和时,可能会出现积分增益过大导致积分饱和(windup)的问题,这将导致控制输出的不稳定和性能下降。回溯计算技术通过逆向跟踪未饱和状态下的积分值,当系统饱和时可以避免积分的累积误差。然而,这种方法可能需要额外的参数调整,对于不同类型的系统可能不适用。
作者的新方法巧妙地融合了回溯计算与条件积分,它能够在保证系统稳定性的同时,对不同正常化死时间(Normalized Dead Time, NDT)的工艺过程提供满意的性能。这种设计避免了过度依赖参数调整,简化了实施步骤,特别适合于工业调节器的实时应用。它能够自动适应各种工况,即使在执行器接近饱和的条件下也能保持良好的控制效果。
通过这种改进的抗饱和策略,PID控制器能够更好地应对实际工业环境中的挑战,提高了控制系统的鲁棒性和可靠性。这对于提高生产效率,减少停机时间和降低成本具有重要意义。这种创新的方法为PID控制器在现代工业自动化领域的广泛应用提供了新的可能,尤其是在需要高精度和稳定性的复杂控制系统中。
Modified anti-windup scheme for PID controllers
A. Visioli
Abstract: An anti-windup scheme for proportional-integral-derivative controllers is presented.
The approach is based on the combined use of back-calculation and conditional integration anti-
windup techniques. In this way, the disadvantages that can hinder previously proposed strategies
are overcome. Specifically, the method can guarantee a satisfactor y performance for processes
with different normalised dead times, without the tuning of additional parameters being required.
Therefore, considering its simplicity, it is highly suitable for implementation in industrial
regulators.
1 Introduction
Despite the advent of many effective design methodologies
in the control field in recent years, propor tional-integral-
derivative (PID) controllers are undoubtedly still the most
adopted controllers in industrial settings, because they
provideacost=benefit ratio that is very difficult to amelio-
rate by other t ech niques. However, the performance of PID
controllers can be severely limited i n practical cases by the
presence of saturation of the actuators, which causes the
well-known phenomenon of integrator windup [1].
To deal with this problem, it is necessary, from a
theoretical point of view, to design the controller explicitly
taking into account the actuator c onstraints from the first
stage, e.g. refer ring to the nonlinear systems framework.
However, the overall design becomes mu ch more compli-
cated and therefore inappropriate in the PID control
context, where the ease of implementation has to be
preserved as a major feature. Therefore, the typical
method to deal with the integrator windup problem is to
tune the controller ignoring the actuator saturation and
subsequently to add an anti-windup compensator to
prevent the degradation of performance. In this context,
several techniques have been devised to de sign the
compensator [2, 3]. Basically, they b elong to two different
approaches, namely, conditional integration (in which the
value of the integrator is frozen when certain conditions
are verified) and back-calculation (in which the difference
between the controller output and the actual process input
is fed back to the integral terms) [4]. Note that the latter
case also includes the conditioning technique [5, 6] and
that a unified framework for the linear ti me-invariant anti-
windup schemes (including the use of an observer to
estimate the correct state of the controller [7, 8])has
been pre s en t ed in [9].
However, these techniq ues can s uffer from the presence
of a significant dead time in the process or, to deal with
processes with different normalised dead times, they might
require an extra tuning effort (see Section 2), which is
undesirable for industrial regulators. Therefore, it is
proposed to combine the different approaches (in a very
simple way) in order to overcome these problems.
2 Anti-windup strategies for PID controllers
2.1 Generalities
The int eg ra tor windu p is a phenom eno n that can oc cur in
the presence of a saturation of the process input. We refer
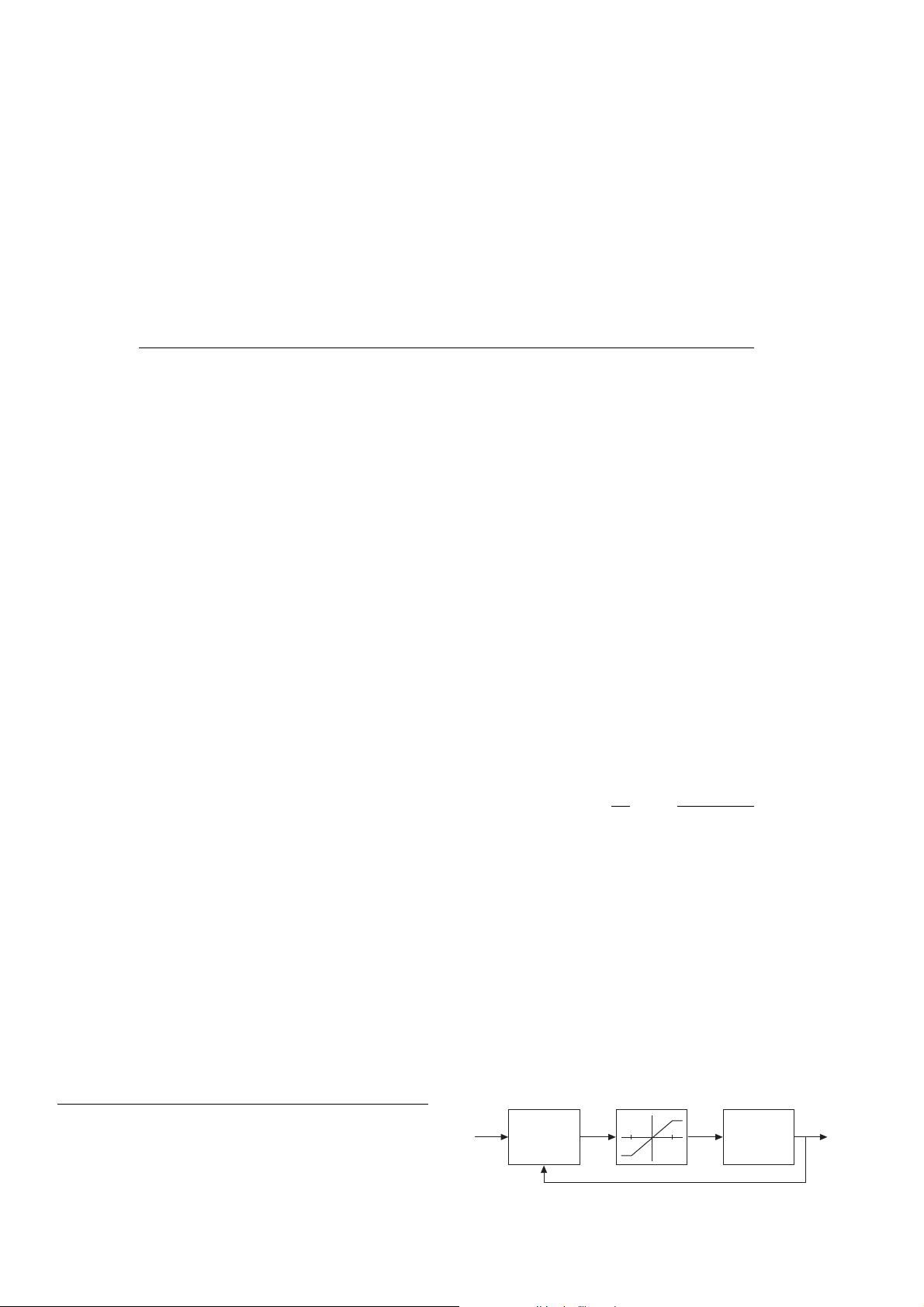
totheschemeofFig. 1,whereu is the controller output, u
s
is the actual process input, y is the process output, w is the
setpoint reference value and e i s the s ystem er ror. It is
assumed that a transition from the value y
0
to the value y
1
is
required for the system output and this determines the
amplitude of the step signal to be applied as input to
the closed-loop system. The PID controller is described by
the following expression (non-interacting form) in the
Laplace domain:
UðsÞ¼K
p
EðsÞþ
1
T
i
s
EðsÞ
sT
d
1 þ sðT
d
=NÞ
Y ðsÞ
ð1Þ
where K
p
, T
i
and T
d
are the proportional gain and the
integral and derivative time constants respectively, and N is
usually set between five and 20.
The integrator w indup occurs when a step change in w
causes the actuator to saturate. In this case the system error
decreases more slowly than in the ideal case (when there is
no input limitation) and therefore the value of the integral
term becom es large. Thus, even when the value of y attains
that of w, the controller still saturates due to the integral
term and this generally leads to large overshoots and
settling times.
It has to be noted that the integrator windup m ainly
occurs when a step is applied to the reference setpoint
signal rather than to the manipulated variable (i.e. in the
# IEE, 2003
IEE Proceedings online no. 20020769
DOI: 10.1049/ip-cta:20020769
Paper first received 22nd April and in revised form 20th September 2002
The author is with the Dipartimento di Elettronica per l’Automazione,
University of Brescia, Via Branze 38, 25123 Brescia, Italy
µ
s
min
µ
s
max
u
s
u
PID
wy
process
Fig. 1 General control scheme
IEE Proc.-Control Theory Appl., Vol. 150, No. 1, January 2003 49
下载后可阅读完整内容,剩余5页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-06-01 上传
2021-02-10 上传
2019-08-16 上传
2021-08-11 上传
2022-07-14 上传
2014-06-06 上传
2023-07-25 上传

greedyhao
- 粉丝: 296
- 资源: 16
 我的内容管理
展开
我的内容管理
展开







最新资源
- 正整数数组验证库:确保值符合正整数规则
- 系统移植工具集:镜像、工具链及其他必备软件包
- 掌握JavaScript加密技术:客户端加密核心要点
- AWS环境下Java应用的构建与优化指南
- Grav插件动态调整上传图像大小提高性能
- InversifyJS示例应用:演示OOP与依赖注入
- Laravel与Workerman构建PHP WebSocket即时通讯解决方案
- 前端开发利器:SPRjs快速粘合JavaScript文件脚本
- Windows平台RNNoise演示及编译方法说明
- GitHub Action实现站点自动化部署到网格环境
- Delphi实现磁盘容量检测与柱状图展示
- 亲测可用的简易微信抽奖小程序源码分享
- 如何利用JD抢单助手提升秒杀成功率
- 快速部署WordPress:使用Docker和generator-docker-wordpress
- 探索多功能计算器:日志记录与数据转换能力
- WearableSensing: 使用Java连接Zephyr Bioharness数据到服务器
