深度探索计算机视觉前沿:理论与实践创新
《计算机视觉高级主题》是一本涵盖了计算机视觉与模式识别领域的深度研究著作,由Giovanni Maria Farinella、Sebastiano Battiato和Roberto Cipolla三位编者编辑。该书作为"计算机视觉与模式识别进展"系列的一部分,共收录了433页的内容,于2013年9月24日出版,以英文撰写,具有Springer出版社的版权。书号分别为ISBN-10: 144715519X和ISBN-13: 978-1447155195。
本书的核心内容包括多个前沿课题,既探讨了理论层面的深入研究,也展示了实践应用中的创新算法。书中涉及的关键知识点有:
1. 视觉特征与轨迹特征:章节详细介绍了视觉特征提取技术,这对于图像理解和分析至关重要,是后续处理如对象识别的基础。
2. 立体匹配:研究了如何通过立体视觉来实现空间深度感知,这是三维重建的关键步骤。
3. 半监督对象识别挑战与方法:深入剖析了在标注数据有限的情况下,如何提高物体识别的准确性和鲁棒性,以及介绍了一种新颖的人类动作分类方法。
4. 微型飞行器(MAVs)的视觉定位:针对无人飞行器的视觉导航技术进行了探讨,这在自主机器人和无人机领域具有重要价值。
5. 形状优化中的矩形约束:讨论了利用矩形约束进行凸形状优化的问题,对计算机图形学和机器人设计有实际应用。
6. 协同识别问题与大规模图像分类:针对多模态或跨模态识别问题,提供了基于距离的分类器,适用于海量图像的高效分类。
7. 四色定理在MRF问题中的应用:将数学理论与计算机视觉结合,展示了如何通过解决四色问题来优化概率图模型。
8. 室内环境理解与增强学习:介绍了采用贝叶斯生成模型来解析复杂室内场景的方法,以及如何通过提升k-NN规则来改进机器学习性能。
9. 场景特定物体检测:专门针对特定环境下的物体检测问题进行了深入探讨,这对智能监控和自动驾驶等场景极为重要。
10. 视频超分辨率时间序列:研究了如何利用时间信息来提升视频分辨率,增强了视觉体验和分析能力。
《计算机视觉高级主题》提供了一个综合的视角,展示了当前计算机视觉研究的前沿趋势和技术突破,对于研究人员、工程师以及对该领域感兴趣的学生来说,是一本不可多得的参考资料。
4 M. Weinmann
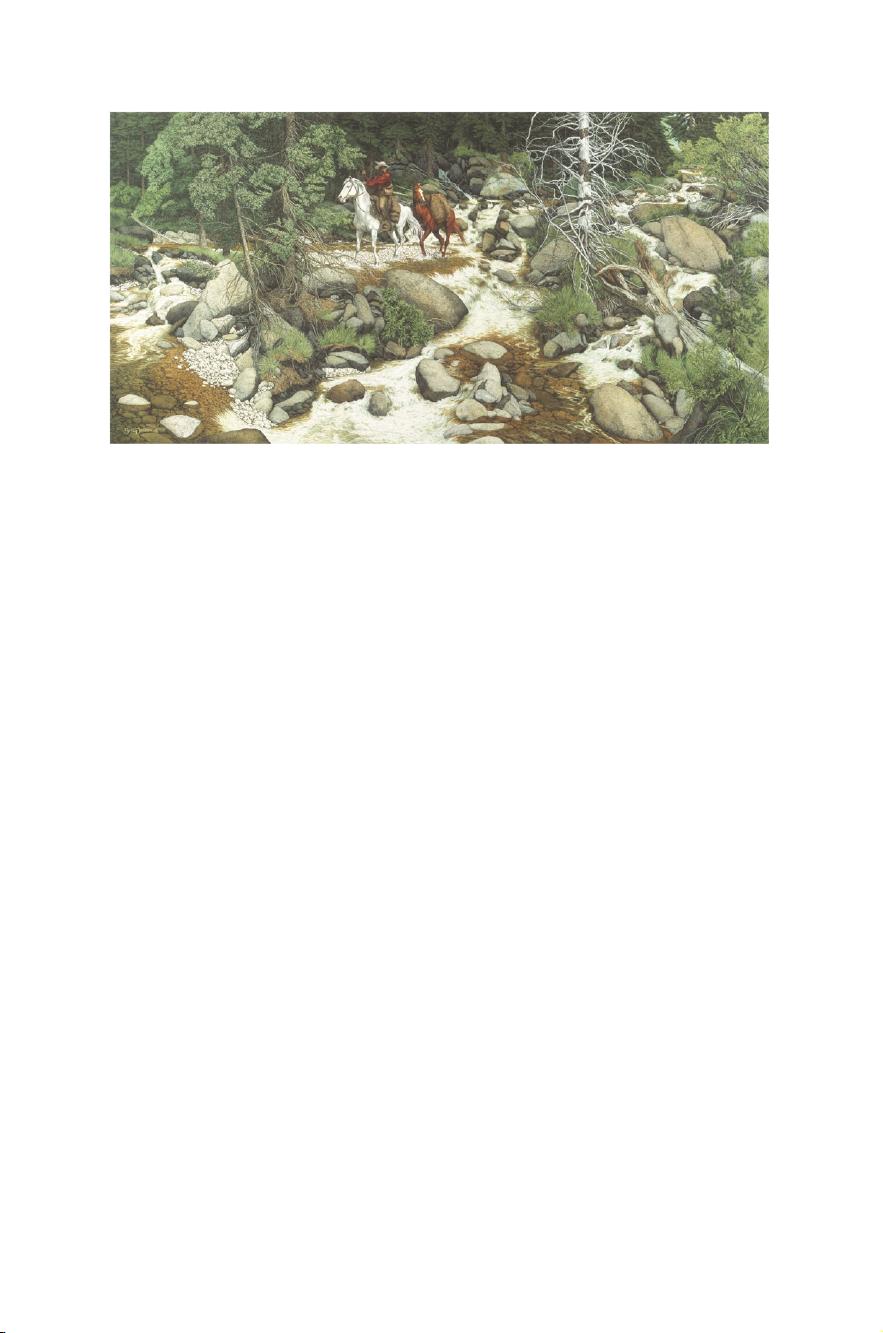
Fig. 1.2 Illusion showing that an image might be more than the sum of its parts (“The Forest Has
Eyes” © Bev Doolittle/The Greenwich Workshop, Inc.)
Since then, many investigations yielded improved insights into human vision. Dif-
ferent psychological theories have been established among which Structuralism,
Gestalt Theory and the Theory of Ecological Optics cover important ideas which
finally led to cognitive and computational approaches to visual perception. With all
these ideas, a growing awareness of the importance of visual features emerged.
Structuralism, where perception is based on a large number of sensory atoms
measuring color at specific locations within the field of view, represents a very sim-
ple principle of visual perception. However, when considering visual illusions such
as the one depicted in Fig. 1.2, it becomes apparent that the whole might be dif-
ferent from the sum of its parts, which has already been that concisely summarized
by Aristotle. Hence, visual perception not only involves local image characteristics
such as lines, angles, colors or shape, but also grouping processes for what has been
detected with the senses and the respective interpretation. In Fig. 1.2, the grouping
processes arise from the fact that human vision is biased and trained to see faces. The
concept of Holism where the whole cannot be represented by utilizing the sum of its
parts alone due to relations between the parts has been addressed in Gestalt Theory.
The term gestalt can be seen as a German synonym for shape, form, figure or config-
uration. Summarizing the main ideas of Gestalt Theory, it has already been stated in
1924 that “there are entities where the behavior of the whole cannot be derived from
its individual elements nor from the way these elements fit together; rather the oppo-
site is true: the properties of any of the parts are determined by the intrinsic structural
laws of the whole” [146]. These structural laws of the whole correspond to relations
between the parts and, as a consequence, special principles for grouping elements
of an image have been proposed. According to [145] and [70], the visual system
uses different principles for automatically grouping elements into patterns such as
proximity, similarity, closure, symmetry, common fate (i.e. common motion) and
continuity.In[50], further principles like homogeneity and contour are proposed.



剩余436页未读,继续阅读
2019-05-24 上传
2019-06-05 上传
2019-07-16 上传
2019-02-23 上传
2018-06-24 上传
2019-02-23 上传
2011-07-24 上传
点击了解资源详情
点击了解资源详情

yinkaisheng-nj
- 粉丝: 762
- 资源: 6231
 我的内容管理
展开
我的内容管理
展开







最新资源
- 新型智能电加热器:触摸感应与自动温控技术
- 社区物流信息管理系统的毕业设计实现
- VB门诊管理系统设计与实现(附论文与源代码)
- 剪叉式高空作业平台稳定性研究与创新设计
- DAMA CDGA考试必备:真题模拟及章节重点解析
- TaskExplorer:全新升级的系统监控与任务管理工具
- 新型碎纸机进纸间隙调整技术解析
- 有腿移动机器人动作教学与技术存储介质的研究
- 基于遗传算法优化的RBF神经网络分析工具
- Visual Basic入门教程完整版PDF下载
- 海洋岸滩保洁与垃圾清运服务招标文件公示
- 触摸屏测量仪器与粘度测定方法
- PSO多目标优化问题求解代码详解
- 有机硅组合物及差异剥离纸或膜技术分析
- Win10快速关机技巧:去除关机阻止功能
- 创新打印机设计:速释打印头与压纸辊安装拆卸便捷性
