2019目标检测技术探索:R-CNN到YOLO
需积分: 0 53 浏览量
更新于2024-08-05
收藏 1.52MB PDF 举报
"一份2019年目标检测指南,涵盖了R-CNN系列模型,包括R-CNN、Fast R-CNN、Faster R-CNN、Mask R-CNN,以及SSD、YOLO和Objects as Points等算法,还有数据增强策略在目标检测中的应用。"
在计算机视觉领域,目标检测是关键的技术之一,它不仅识别图像中的对象,还能精确地定位这些对象的位置。2019年的目标检测指南深入浅出地介绍了这一领域的基础知识和前沿算法。
首先,R-CNN(Regions with CNN features)是目标检测的一个里程碑式模型。它引入了两步检测方法,先通过选择性搜索等方法生成候选区域,再用预训练的CNN提取特征,最后用SVM进行分类。R-CNN的效率较低,因为它需要对每个候选区域单独运行CNN,但它的准确度相对较高,为后续的改进奠定了基础。
Fast R-CNN随后出现,优化了R-CNN的流程,通过共享卷积层计算,大大减少了计算时间。而Faster R-CNN则进一步引入了区域提议网络(Region Proposal Network,RPN),使得整个目标检测过程成为端到端的学习,提高了速度和效率。
Mask R-CNN是在Faster R-CNN基础上增加了像素级别的语义分割,能同时完成目标检测和实例分割任务,对每个目标提供像素级的分类。
SSD(Single Shot MultiBox Detector)和YOLO(You Only Look Once)是单阶段检测器,它们摒弃了候选区域生成步骤,直接预测边界框和类别,速度更快,适用于实时应用场景。YOLO尤其以其快速和简洁的架构著称。
Objects as Points是一种新颖的方法,它试图简化目标检测问题,将目标表示为单个点,从而减少计算复杂性。
在训练模型时,数据增强策略是提高模型泛化能力的重要手段。旋转、缩放、剪裁等操作能增加模型对图像变化的鲁棒性。
2019年目标检测指南详尽地梳理了当时主流的目标检测算法,这些技术在自动驾驶、安防监控、无人机等领域发挥着重要作用,不断推动着计算机视觉技术的发展。通过理解和应用这些模型,开发者和研究者可以构建更高效、更准确的目标检测系统。
该模型采用选择性搜索(selective search)方法来生成区域类别,根据颜色、纹理、
形状和大小选择搜索对相似的区域进行分组。在特征提取方面,该模型使用CNN的一个
Caffe实现版本对每个候选区域抽取一个4096维度的特征向量。将227×227 RGB图像通
过5个卷积层和2个完全连接层进行前向传播,计算特征。论文中所解释的模型与之前
在PASCAL VOC 2012的结果相比,取得了30%的相对改进。
而R-CNN的一些缺点是:
训练需要多阶段:先用ConvNet进行微调,再用SVM进行分类,最后通过
regression对boundingbox进行微调。
训练空间喝时间成本大:因为像VGG16这样的深度网络占用了大量的空间。
目标检测慢:因为其需要对每个目标候选进行前向计算。
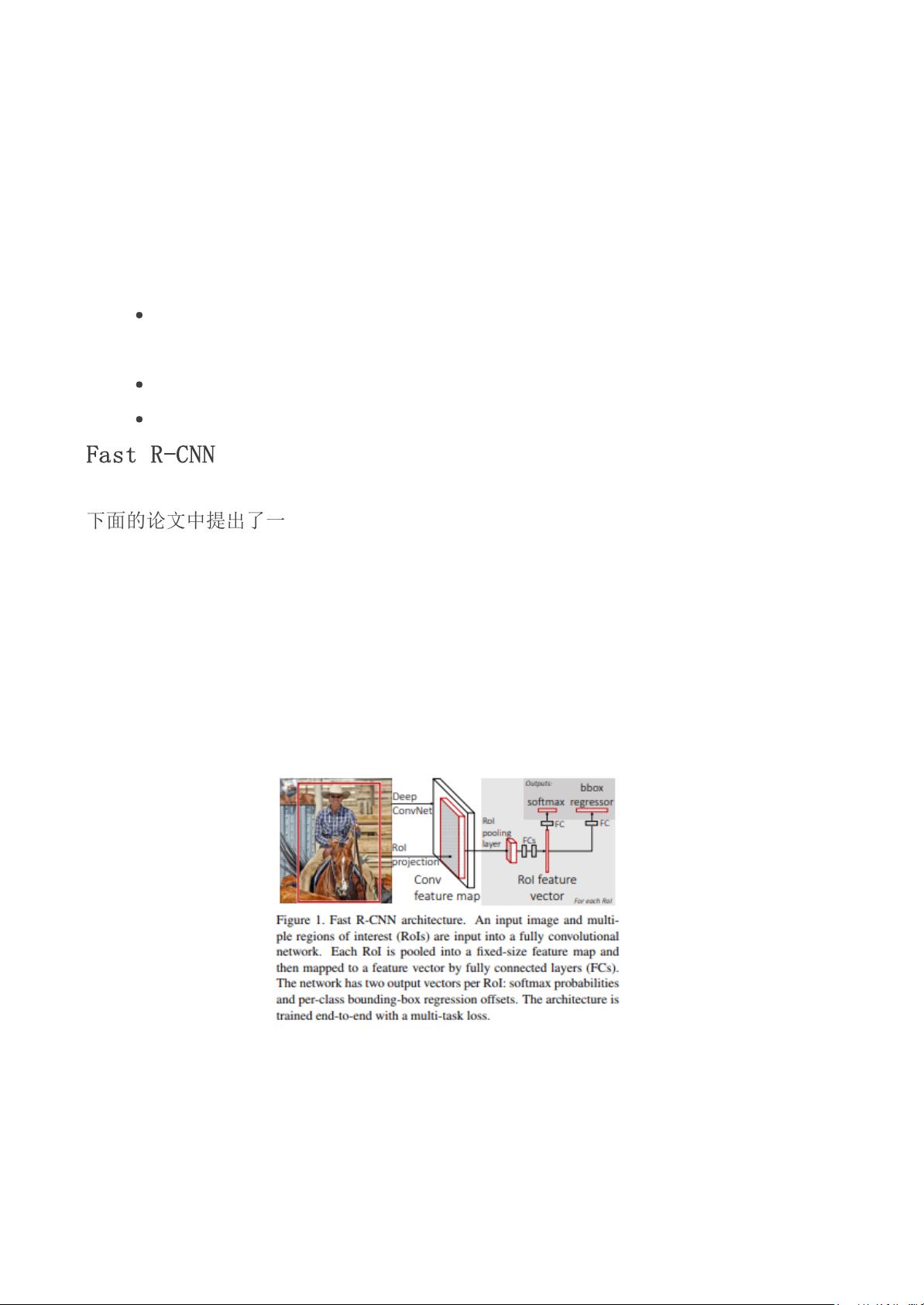
Fast R-CNN
下面的论文中提出了一种名为Fast Region-based Convolutional Network(Fast R-
CNN)目标检测方法。
https://arxiv.org/abs/1504.08083?source=post_page---------------------------
它是用Python和c++使用Caffe实现的。该模型在PASCAL VOC 2012上的平均精度为
66%,而R-CNN的平均精度为62%。
与R-CNN相比,Fast R-CNN具有更高的平均精度、单阶段训练,训练更新所有网络层并
且特征缓存不需要磁盘存储。
在其架构中, Fast R-CNN接收图像以及一组目标候选作为输入。然后通过卷积层和池
化层对图像进行处理,生成卷积特征映射。然后,通过针对每个推荐区域,ROI池化层
从每个特征映射中提取固定大小的特征向量。
剩余10页未读,继续阅读
2019-12-21 上传
2019-08-17 上传
2021-09-28 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

豆瓣时间
- 粉丝: 28
- 资源: 329
 我的内容管理
展开
我的内容管理
展开







最新资源
- JHU荣誉单变量微积分课程教案介绍
- Naruto爱好者必备CLI测试应用
- Android应用显示Ignaz-Taschner-Gymnasium取消课程概览
- ASP学生信息档案管理系统毕业设计及完整源码
- Java商城源码解析:酒店管理系统快速开发指南
- 构建可解析文本框:.NET 3.5中实现文本解析与验证
- Java语言打造任天堂红白机模拟器—nes4j解析
- 基于Hadoop和Hive的网络流量分析工具介绍
- Unity实现帝国象棋:从游戏到复刻
- WordPress文档嵌入插件:无需浏览器插件即可上传和显示文档
- Android开源项目精选:优秀项目篇
- 黑色设计商务酷站模板 - 网站构建新选择
- Rollup插件去除JS文件横幅:横扫许可证头
- AngularDart中Hammock服务的使用与REST API集成
- 开源AVR编程器:高效、低成本的微控制器编程解决方案
- Anya Keller 图片组合的开发部署记录
