PID控制下的一阶倒立摆稳态仿真与多变量扩展
版权申诉
本文主要探讨的是基于PID(比例-积分-微分)控制的单片机在一阶倒立摆控制系统中的应用。首先,文章介绍了PID控制的基本理论,包括比例(P)、积分(I)和微分(D)控制的作用及其在系统稳定性中的关键作用。PID控制是一种常见的工业级控制策略,通过调整这三个参数来补偿系统的动态特性,以实现精确的系统响应。
在方案设计部分,作者构建了一阶倒立摆的数学模型,包括微分方程、传递函数和状态空间方程,这些都是控制理论的基础,用于理解系统的行为和设计合适的控制器。一阶倒立摆系统以其自然不稳定性和复杂动态特性,展示了控制理论的实际挑战。
接下来,软件编程与仿真占据了主要内容。作者详细描述了实际系统参数的选择,PID控制器的设计分析,以及如何通过MATLAB进行仿真。MATLAB在这里作为工具,帮助设计者分析控制器性能并优化参数,以实现对倒立摆的精确控制。同时,文章还涉及了单极倒立摆的建模,这可能是通过简化模型来更直观地理解和控制系统的动态行为。
然而,文章指出PID控制作为单输入单输出系统,其局限性在于只能控制摆杆的角度,无法直接控制小车的位置。为解决这个问题,作者提到了利用现代控制理论,如采用多输入多输出(MIMO)控制算法,可能结合小车加速度作为额外输入,以实现对摆杆角度和小车位置的双重控制,从而提升系统的整体稳定性。
系统调试和结果分析部分,作者展示了通过实验验证PID控制器性能的过程,以及对系统达到稳定状态后的扰动应对能力。最后,作者总结了研究的主要发现,对未来可能的研究方向进行了展望,并分享了课程设计的心得体会。
本文深入研究了一阶倒立摆系统的PID控制,不仅介绍了理论基础,还通过实践仿真和实验验证了控制方法的有效性,同时讨论了如何通过扩展控制策略来提升系统的控制精度和鲁棒性。这是一项重要的研究,对于理解控制理论在实际嵌入式系统中的应用具有重要意义。
误差的变化。解决的办法是使抑制误差的作用的变化“超前”,即在误差接近零时,抑制误
差的作用就应该是零。这就是说,在控制器中仅引入 “比例”项往往是不够的,比例项的作
用仅是放大误差的幅值,而目前需要增加的是“微分项”,它能预测误差变化的趋势,这样
具有比例+微分的控制器,就能够提前使抑制误差的控制作用等于零,甚至为负值,从而
避免了被控量的严重超调。所以对有较大惯性或滞后的被控对象,比例+微分(PD)控制
器能改善系统在调节过程中的动态特性。
软件部分实现在 PID控制器各校正环节中,比例环节成比例地反映控制系统的偏差信
号,偏差一旦产生,控制器立即产生控制作用,以减少偏差;积分环节主要用于消除稳态
误差,提高系统的型别,积分作用的强弱取决于积分时间常数Ti,Ti越大,积分作用越弱,
反之则越强;微分环节反映信号的变化趋势,即变化速率,并能在偏差信号值变得太大之前
在系统中引入一个有效地早起修正信号,从而加快系统的动作速度,减小调节时间。
PID控制器由比例单元(P)、积分单元(I)和微分单元(D)组成。其输入 与输出
的关系为:
(1.1)
式中积分的上下限分别是 和 ,因此它的传递函数为:
比例作用下,通过现场试验找到等幅震荡的过渡过程,记下此时的比例度和等幅振
荡周期,再通过简单的计算求出衰减振荡时控制器的参数。
3 系统模型建立
3.1 一阶倒立摆的微分方程模型
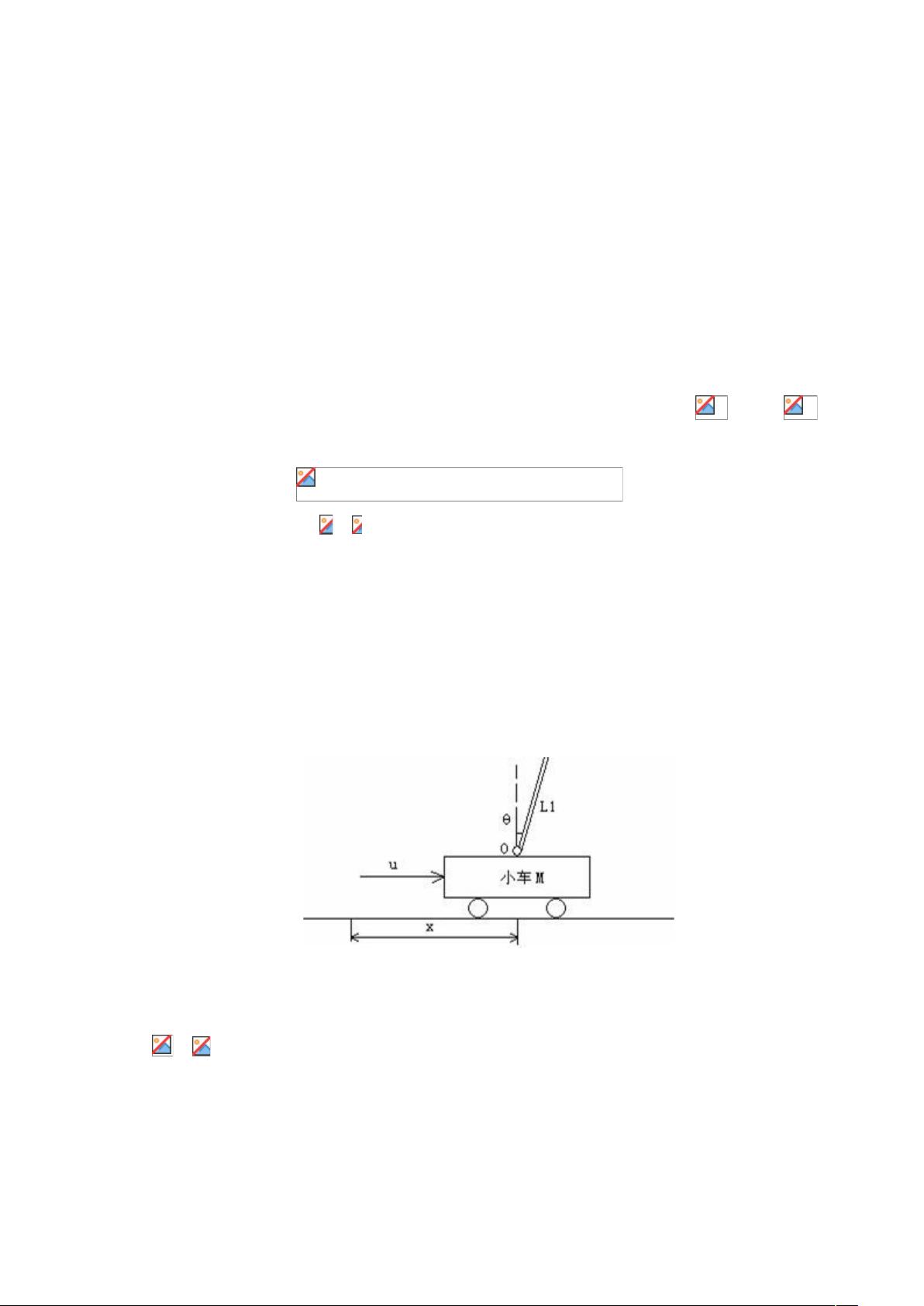
在忽略了空气流动,各种摩擦之后,可将倒立摆系统抽象成小车和匀质杆组成的系统
如下图2.2所示
图2.2 单级倒立摆模型示意图
下面我们对这个系统作一下受力分析。下图2.3是系统中小车和摆杆的受力分析图。其
中, 和 为小车与摆杆相互作用力的水平和垂直方向的分量。
注意:在实际倒立摆系统中检测和执行装置的正负方向已经完全确定,因而矢量方向
定义如图,图示方向为矢量正方向。
剩余20页未读,继续阅读
2019-03-14 上传
2021-09-18 上传
2022-05-31 上传
2021-09-24 上传
2022-06-03 上传
2022-10-23 上传
2021-12-02 上传

猫一样的女子245
- 粉丝: 230
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- spring in action
- 构建嵌入式Linux系统(2008年第二英文版)
- Linux 系统命令及其使用详解.doc
- 一款嵌入式系统的应用设计_打造超大容量mp3播放机.pdf
- Classification of data from electronic nose using relevance vector machines
- 嵌入式LInux初学者教程
- uc/os 嵌入式实时操作系统
- 产品规划模板--资源共享
- 你必须知道的asp.net 很全很好用
- ADS步步学 教程 ADS步步学 教程
- 基于asp的网上书店系统样本
- 基于Linux的计算系统性能监控
- C++设计模式代码解析
- TD.pdf---TestDirector操作描述
- ArcGIS Engine轻松入门
- VB常用函数——给初学者
