
计算机研究与发展2014,51(3)
数,并将TD误差引入到求解最优策略参数的目标
函数中,在行动者部分利用所构造的目标函数求解
最优策略参数,提高策略参数估计的精确性.利用最
小二乘方法求解参数可以有效消除初始值对最终收
敛结果的影响,提高样本数据的利用率,同时避免梯
度算法中调整学习参数的问题.最后,将本文提出的
算法用于解决具有连续动作空间的小车平衡杆问题
和mountain
car问题,并与Cacla和eNAC(叩isodic
natural
actor—critic)…朝这2种解决连续动作空间
的经典算法进行比较和分析.实验结果表明,本文的
算法能有效地解决连续动作空间问题,具有较优的
执行性能.
1
基础理论
1.1
Markov决策过程
Markov决策过程(Markov
decision
process,
MDP)常被用来对强化学习问题进行建模¨j.通常
一个MDP可以用一个五元组表示,M一(X,U,厂,
p,y),其中,X是状态空间,U是动作空间,厂是状态
转移函数,厂:X×U×X一[o,1],即/’(T,“,T
7)表示
在状态z∈X下采用动作“∈U转移到后续状态
z
7∈X的概率;』D是奖赏函数,10:X×U—i,即』0(T,
“)表示在状态z下采用动作“所获得的立即奖赏,
而通常为了简化,用“表示在任意时刻是当前状态
动作对的立即奖赏值,即“一|0(z。,“。);y∈(o,1)是
折扣因子.
强化学习算法可以用于求解一个不会随着时间
的变化而改变的策略,即稳定策略,并可以利用该策
略进行决策.在强化学习中,策略矗可以表示为^:
X×U一[o,1].^(z,“)是指在状态z下采取动作“
的概率.如果策略^是一个确定性策略,则在任意状
态z下,根据策略^只能获得一个确定的动作,而
不是动作选择的概率,由此,确定的稳定策略可以表
示为:^:X—U,因此,在状态T下采取的动作可以
表示为:“一^(z).在后续文中如果没有特别说明,
策略^都是指确定性策略.
为了评估用于某个MDP的策略^的优劣,通
常利用值函数进行评估,具体可以分为状态值函数
V“和动作值函数Q6,其中V‘(z)是在当前状态T
下根据策略^所能获得的累计期望奖赏,Q,7(z,“)
是在当前状态动作对(z,“)下根据策略^所能获得
的累计期望奖赏.V6(z)和d2(工,“)都可以认为是
对应的一组Bellman公式的不动点解,可以表示为
驴(z)一∑^(z,“)l
lD(工,“)+
“∈U
L-
),∑厂(zmz
7)驴(z圳,
(1)
r’∈X
—
Q^(工,“)一lD(z,“)+),∑厂(z,“,z7)
J’∈X
y矗(z7,“7)甜(z
7,“7).
(2)
篇7
强化学习的最终目的是能够求得一个最优策略
^’,对应的值函数V’(z)和Q+(z,“)可以描述为
V+(z)一H曼簪{』D(z,扰)+y∑/(z,蹦,z7)y’(z7)),
“t“
T’∈X
(3)
Q+(z,“)一10(z,“)+y∑,(z,“,z
7)
J’∈X
{maxQ+(z
7,“7)},
(4)
“4∈U
式(3)和式(4)也被称作是最优Bellman公式.
以下给出有界MDP的定义.在本文所讨论的
MDP都是有界的.
定义1.有界MDP.假设X和U都是一个有限
集合;奖赏值函数|0有界,即对于任意(z,“)∈X×
U,R…≤p(z,“)≤R…,其中R…和R。。。是常数;设
口一1/(1一y),其中y∈(o,1)为折扣因子,则在任意
策略^下,对于Vz∈X及V(T,“)∈x×U,都有
雕…≤V6(z)≤胆。。。和艘。。。≤甜(z,“)≤胆。。。
成立.
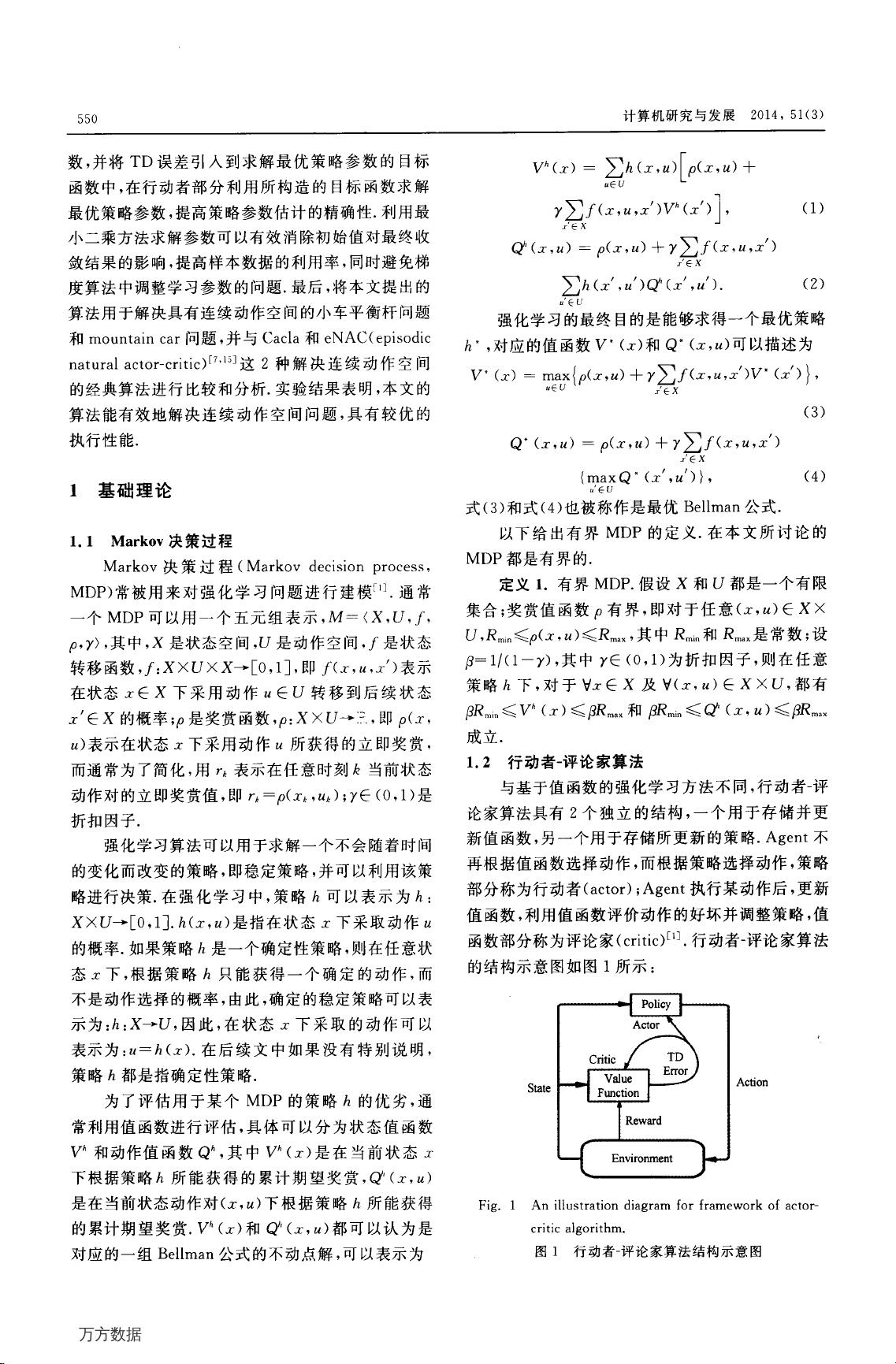
1.2行动者一评论家算法
与基于值函数的强化学习方法不同,行动者一评
论家算法具有2个独立的结构,一个用于存储并更
新值函数,另一个用于存储所更新的策略.Agent不
再根据值函数选择动作,而根据策略选择动作,策略
部分称为行动者(actor);Agent执行某动作后,更新
值函数,利用值函数评价动作的好坏并调整策略,值
函数部分称为评论家(critic)[1].行动者一评论家算法
的结构示意图如图1所示:
Fig.
1
An
illustration
diagram
for
framework
of
actor—
critic
algorithm.
图1
行动者一评论家算法结构示意图
万方数据
剩余11页未读,继续阅读

weixin_38749268
- 粉丝: 5
- 资源: 943
 我的内容管理
展开
我的内容管理
展开







最新资源
- WebLogic集群配置与管理实战指南
- AIX5.3上安装Weblogic 9.2详细步骤
- 面向对象编程模拟试题详解与解析
- Flex+FMS2.0中文教程:开发流媒体应用的实践指南
- PID调节深入解析:从入门到精通
- 数字水印技术:保护版权的新防线
- 8位数码管显示24小时制数字电子钟程序设计
- Mhdd免费版详细使用教程:硬盘检测与坏道屏蔽
- 操作系统期末复习指南:进程、线程与系统调用详解
- Cognos8性能优化指南:软件参数与报表设计调优
- Cognos8开发入门:从Transformer到ReportStudio
- Cisco 6509交换机配置全面指南
- C#入门:XML基础教程与实例解析
- Matlab振动分析详解:从单自由度到6自由度模型
- Eclipse JDT中的ASTParser详解与核心类介绍
- Java程序员必备资源网站大全
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


