




粘弹性阻尼器隔震结构的混合控制有效性研究及动态仿真
下载需积分: 50 | PDF格式 | 1.22MB |
更新于2024-08-10
| 157 浏览量 | 举报
本文主要探讨了粘弹性阻尼器隔震结构的振动控制问题,发表于2008年,作者胡智渊是南昌市第一建筑工程公司的工程师,研究方向集中在高层建筑抗震领域。论文的核心内容聚焦于一种混合振动控制策略,该策略结合了主动控制、半主动控制和被动控制的优点。
研究中,作者利用开尔文模型来模拟粘弹性阻尼器产生的非线性力,这是一种常用的方法,因为它能够准确地描绘出粘弹性材料的耗能特性,其力-位移滞回曲线呈现出椭圆形,这使得其消能能力远超位移相关型的减振装置。对于基础隔震结构,作者考虑到了橡胶垫隔震技术的潜在风险,即橡胶垫在强烈地震下的破坏可能性,因此提出了一种创新的混合控制方案:在隔震层连接作动器,通过控制作动器施加力来抑制橡胶垫的过度水平变形,同时在上部结构配备粘弹性阻尼器,进一步控制整体结构的变形。
在理论分析阶段,作者推导出了混合控制的运动微分方程,并应用线性二次型最优控制理论(LQR),这是一种优化控制方法,旨在最小化系统的震动响应。借助MATLAB软件,作者编写了动态仿真程序,对该控制策略进行了详尽的数值模拟。通过仿真结果,研究证实了设置粘弹性阻尼器的隔震结构采用混合控制策略是有效的,显著降低了隔震层和顶层的位移反应,从而提高了结构的整体抗震性能。
这篇论文不仅深化了对粘弹性阻尼器在隔震结构中的应用理解,还提供了实际工程中结构振动控制的一种创新思路,对提高建筑物的抗震能力具有重要意义。它为后续的结构设计和地震工程领域的研究提供了有价值的数据支持和理论依据。
收稿日期 :2008 - 01 - 17
作者简介 :胡智渊(1976 - ) ,男 ,江西南昌人 ,南昌市第一建筑工程公司工程师 ,研究方向为高层建筑抗震 .
文章编号 :1005 - 0523(2008)03 - 0032 - 04
粘 弹 性 阻 尼 器 隔 震 结 构 的 振 动 控 制 研 究
胡智渊
(南昌市第一建筑工程公司 ,江西 南昌 330009)
摘要 :对设置粘弹性阻尼且基础隔震结构的混合振动控制问题进行了研究 .采用开尔文模型模拟粘弹性阻尼器所产生的非线
性力 ,推导出混合控制的运动微分方程 ,结合线性二次型最优控制理论(LQR) ,用 MATLAB 编制相应的动态仿真程序进行动态
仿真 .研究结果表明 :设置粘弹性阻尼器隔震结构采用混合控制是有效的 ,结构的隔震层相对位移和顶层位移反应大大降低 .
关 键 词 :混合控制 ;粘弹性阻尼 ;基础隔震 ;线性二次型
中图分类号 :TU352 .1 文献标识码 :A
近年来 ,结构振动控制从理论到实践取得了长足
的发展 ,其中结构混合控制更成为研究的热点 .混合
控制系统可以由主动控制 、半主动控制和被动控制三
者互相结合 ,取长补短 ,以达到控制的最优效果
[1]
.
粘弹性阻尼器是一种有效的耗能减震装置 ,作
为典型的速度相关型阻尼器 ,它是通过粘弹性材料
的滞回变形来减小结构振动反应的 ,其力 - 位移滞
回曲线为椭圆型
[2]
,消能能力比与位移相关的消能
减振装置强得多 ,并且只要有微小的振动 ,就能减
振 .橡胶垫基底隔震技术是目前工程减震中最常用
的技术 .采用叠层橡胶隔震时 ,怎样确保橡胶垫隔震
层的安全是一个非常重要的问题
[3]
,因为橡胶垫在
强烈地震作用下可能由于水平变形过大而发生破
坏 .基于这种思想 ,同时考虑到对上部结构进行控制 ,
研究了在隔震层连接作动器 ,通过作动器施加控制力
来控制橡胶垫的水平变形 ,并在上部结构布置粘弹性
阻尼器来控制上部结构的变形的混合控制系统 .
1 粘弹性阻尼器的计算模型
粘弹性阻尼 器 由 粘 弹 性 材 料 和 约束 钢 板 组
成
[4]
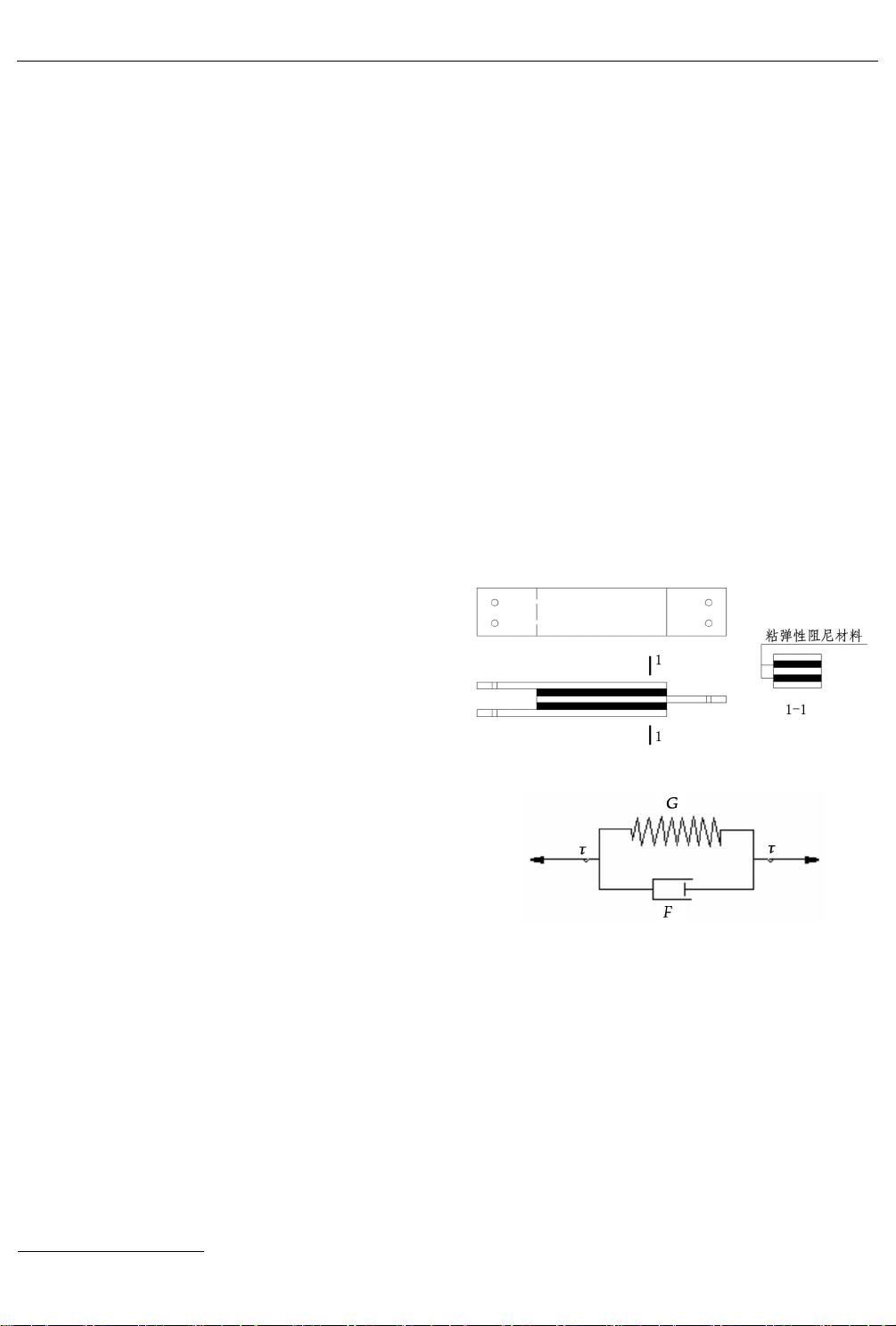
.常用的粘弹性阻尼器如图 1 所示 .其耗能性能
见文献[5] ,常用开尔文模型来描述其耗能性能 .
图 1 粘弹性阻尼器基本形式
图 2 开尔文模型
开尔文模型将粘弹性阻尼器模拟成一个弹性元
件和粘壶元件相并联(如图 2 所示) ,其本构方程为
τ
= G
γ
+ F
痹
γ
(1)
式中 :G 和 F 分别为由粘弹性材料性能确定的
系数 .
由式(1)可写出粘弹性阻尼器的力 - 位移关系
式
r = A
′
1
Δ
+ A
′
2
痹
Δ
= k
e
Δ
+ c
e
痹
Δ
(2)
式中 :A
′
1
,A
′
2
为系数 ,k
e
,c
e
分别为粘弹性阻尼
器的等价刚度和等价阻尼 .用随机等价线性化理论
第 25 卷第 3 期
2008 年 6 月
华 东 交 通 大 学 学 报
Journal of East China Jiaotong University
Vol .25 No .3
Jun .,2008
下载后可阅读完整内容,剩余3页未读,立即下载
相关推荐





weixin_38724229
- 粉丝: 8
 我的内容管理
展开
我的内容管理
展开








最新资源
- WinISO v6.4.0.5170:全能CD-ROM映像处理工具
- jplayer实现高效视频播放体验
- 全面的QT中文帮助文档,新手学习必备指南
- Oracle SQL语句性能优化技巧全解析
- 提升口算技巧:威力口算训练器v1.6更新特点解析
- ActiveMQ学习资料整理:精选英文版与中文版对比
- Git初学者指南:开始掌握Git
- STC单片机成功实现uCOS-II内核移植
- C#源代码实现计算电脑开机启动时间
- Vue 3.0组件库项目介绍与开发指南
- 深入解析联调后程序与Keil for ARM开发环境
- 10款炫酷图片展示效果的JavaScript代码
- iOS开发必备第三方库与功能实现指南
- 自抗扰控制技术系列书籍打包下载
- 紧急求助:C#项目转Delphi技术指导
- 张力线速度计算工具:轻松搞定积分难题






















