PID参数详解与整定实战:提升控制系统性能
需积分: 50 132 浏览量
更新于2024-09-10
收藏 174KB PDF 举报
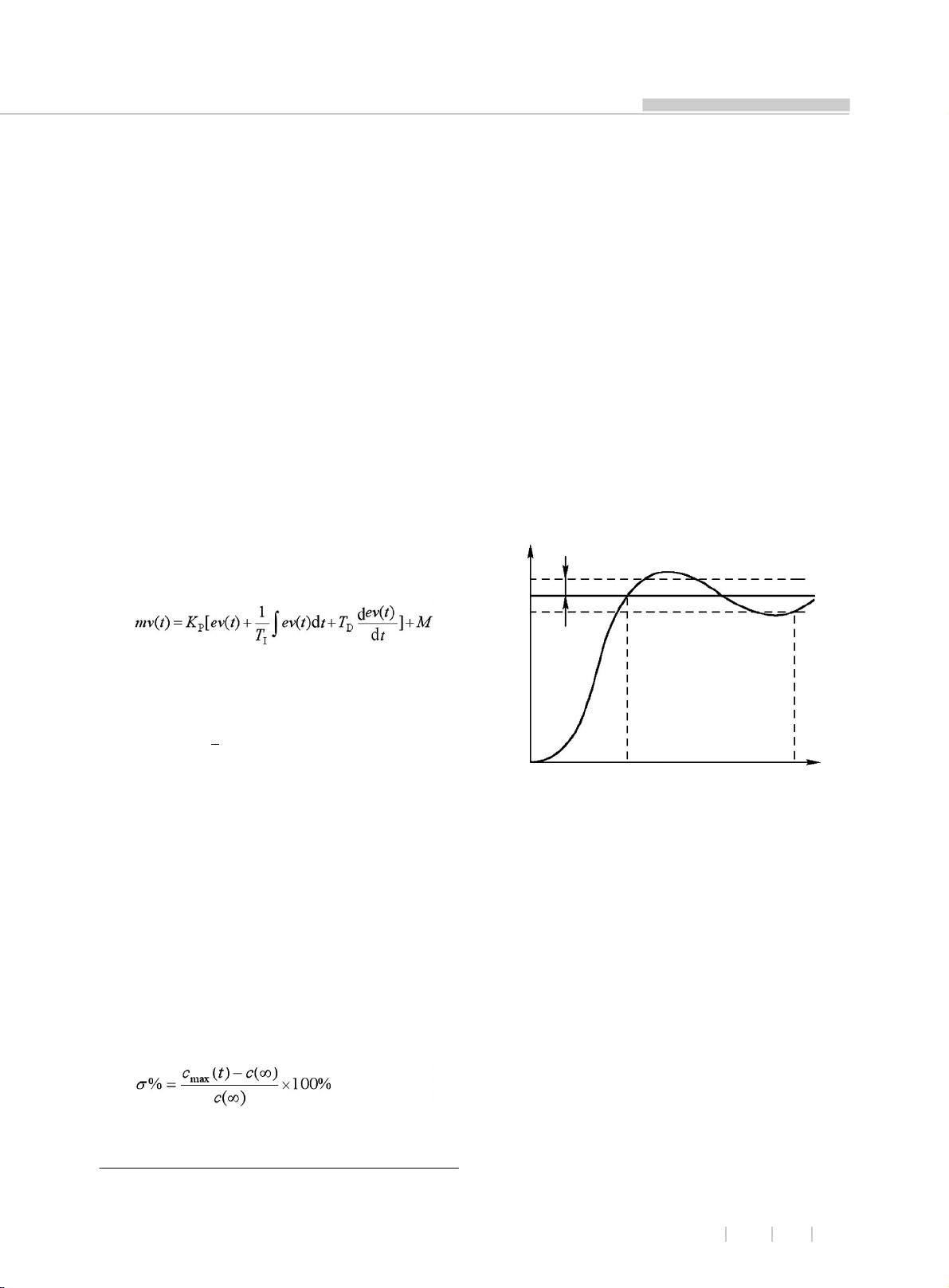
PID参数是Proportional-Integral-Derivative控制器的核心组成部分,它们在模拟量控制系统中发挥着至关重要的作用。PID控制器的数学表达式由比例(P)、积分(I)和微分(D)三部分组成,其输出公式为:
1. 比例作用:控制器的输出mv(t)与误差ev(t)成正比,即mv(t) = KP * ev(t),其中KP是比例系数,决定着对当前误差的快速反应程度。
2. 积分作用:积分部分使得控制器能够消除系统误差积累,通过TI(积分时间)影响输出,当积分达到M(积分部分的初始值)时,会持续调整直到误差消失。
3. 微分作用:微分部分通过TD(微分时间)测量误差的变化率,帮助预测未来趋势,提前修正错误,提高控制精度。
闭环控制系统的关键性能指标包括:
- 阶跃响应:阶跃输入下,系统的动态响应通常被描绘为阶跃响应曲线,它展示了系统从初始状态到稳定状态的过程。调节时间ts指的是误差进入稳态误差带(通常为±5%或±2%)所需的时间,这个时间标志着过渡过程的结束。
- 超调量:当系统响应超过稳态值C_max(t)时,超调量(即C_max(t) - c(∞))衡量了系统响应的振荡程度,反映了系统稳定性的一个侧面。
整定PID参数的方法通常涉及以下几个步骤:
1. 经验法:基于工程师的经验和对系统的理解,设置初始参数值,然后通过实际运行和观察,逐步调整。
2. Ziegler-Nichols法:一种常用的整定方法,通过确定比例带PB、积分时间TI和微分时间TD的初始值,然后通过递增比例带,测量系统的响应,直至找到稳定的平衡点。
3. 自适应控制:利用在线学习算法,根据实时的系统数据调整参数,自动适应环境变化。
4. 最优控制理论:更高级的方法如模型预测控制(MPC)或自校正PID(自整定PID),通过优化算法寻求参数的最佳组合,以实现最小化误差和响应时间的目标。
本文通过仿真实验验证了PID参数整定方法的有效性,强调了参数选择对控制系统性能的影响,并提供了实用的参数调整策略。了解并合理设置PID参数对于实现高效、稳定的自动化控制至关重要,尤其是在伺服及PLC控制系统中,PID参数的精确调整直接影响到系统的响应速度、精度和稳定性。
PID
The Meaning of PID Controller Parameters and Setting Method
Abstract:
Keywords:
evt
evtsptpvt
sptpvtmvt
K
T
T
M
t t
c
t
C
t
c
c
ct
c
t
t
t
下载后可阅读完整内容,剩余3页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2018-05-21 上传
2022-08-02 上传
2021-10-01 上传
2020-12-09 上传
2021-06-29 上传
2009-06-29 上传

mtv10
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- Survey-Form:调查表->响应式Web设计项目-> freeCodeCamp
- OpenCubMan-开源
- 星·露·谷物雨 Python复刻
- CrudOracleMVC-VS2019:Visual Studio 2019中的Crud con Oracle bajo el patron MVC realizado
- 电脑桌面运用图标下载
- MATLAB用拟合出的代码绘图-VolcanicPlutonic:数据和源代码与Keller等人的论文“火山—古今的奇偶性和大陆壳的分化”有关
- Bitzy:充满史诗般的老板的复古游戏! 文森特·杰尼(Vincent Jenei)
- SaveWarpTool:在GoldSource和基于Source引擎的游戏中模拟“保存变形”故障的工具
- Machine-Learning-Python
- WS2812灯带驱动代码teszt.rar
- 用FPGA模拟VGA时序,PS_2总线的键盘接口VHDL源代码.7z
- Project-2-Book-Application:项目2-书本学
- kdb:kdb +教程和代码示例
- DecaRangingCustomerMP_source_code_rev3p05_vcxproj.zip
- c代码-出租车记价表
- tonganh-tonganh-OOLT.20202.20184040.TongNgocAnh
