优化稀疏图回归:2019年动作识别中骨架的高效表达
需积分: 0 141 浏览量
更新于2024-08-05
收藏 1.01MB PDF 举报
2019年的研究论文《优化基于骨骼的行动识别通过稀疏化图回归》(Optimized Skeleton-based Action Recognition via Sparsified Graph Regression)由Xiang Gao、Wei Hu、Jiaxiang Tang、Jiaying Liu和Zongming Guo等人在清华大学计算机科学与技术学院提出。随着深度传感器的普及,动态人体骨骼作为动作识别的一种强大模态引起了广泛关注。传统的研究方法主要依赖于循环神经网络(RNN)或卷积神经网络(CNN),但它们在处理不规则骨骼关节时的表达能力有限。
然而,图卷积网络(GCN)被提出以应对不规则结构数据,但关键的图构建仍然是一个挑战。该论文创新性地将骨骼自然地表示为图,并提出了一种基于图回归的图卷积网络(GR-GCN),旨在捕捉数据中的空间-时间变化。作者认识到图表示对图卷积至关重要,因此首先提出了一种图回归方法,通过统计学习从多观察数据中挖掘潜在的图结构。这种方法特别关注空间-时间特征的学习,通过稀疏化策略来优化模型,减少冗余信息,提高模型的效率和准确性。
GR-GCN的设计考虑了骨骼之间的隐式关联,通过学习节点间的连接权重,有效地捕捉了动作序列中各关节之间的复杂关系。这种稀疏化的图构建允许模型更好地聚焦于动作的关键部分,避免了过拟合,提升了对各种动作的泛化能力。同时,通过将时间和空间维度整合到图卷积过程中,论文提出的方法能够更好地理解和解析动作序列中的动态变化。
这篇论文为骨骼动作识别提供了一个新颖且优化的框架,它不仅解决了图结构建模的问题,还展示了如何通过统计学习和稀疏化策略提升模型的性能。这一研究对于利用骨骼数据进行动作识别的实际应用具有重要意义,特别是在智能监控、运动分析和人机交互等领域。
Optimized Skeleton-based Action Recognition via
Sparsified Graph Regression
Xiang Gao, Wei Hu, Jiaxiang Tang, Jiaying Liu, Zongming Guo
Institute of Computer Science and Technology, Peking University, China
{gyshgx868, forhuwei, hawkey1999, liujiaying, guozongming}@pku.edu.cn
Abstract—With the prevalence of accessible depth sensors,
dynamic human body skeletons have attracted much attention as
a robust modality for action recognition. Previous methods model
skeletons based on RNN or CNN, which has limited expressive
power for irregular skeleton joints. While graph convolutional
networks (GCN) have been proposed to address irregular graph-
structured data, the fundamental graph construction remains
challenging. In this paper, we represent skeletons naturally on
graphs, and propose a graph regression based GCN (GR-GCN)
for skeleton-based action recognition, aiming to capture the
spatio-temporal variation in the data. As the graph representation
is crucial to graph convolution, we first propose graph regres-
sion to statistically learn the underlying graph from multiple
observations. In particular, we provide spatio-temporal modeling
of skeletons and pose an optimization problem on the graph
structure over consecutive frames, which enforces the sparsity of
the underlying graph for efficient representation. The optimized
graph not only connects each joint to its neighboring joints in
the same frame strongly or weakly, but also links with relevant
joints in the previous and subsequent frames. We then feed
the optimized graph into the GCN along with the coordinates
of the skeleton sequence for feature learning, where we deploy
high-order and fast Chebyshev approximation of spectral graph
convolution. Further, we provide analysis of the variation charac-
terization by the Chebyshev approximation. Experimental results
validate the effectiveness of the proposed graph regression and
show that the proposed GR-GCN achieves the state-of-the-art
performance on the widely used NTU RGB+D, UT-Kinect and
SYSU 3D datasets.
Index Terms—Graph regression, graph convolutional net-
works, spatio-temporal graph modeling, skeleton-based action
recognition
I. INTRODUCTION
Action recognition is an active research direction in com-
puter vision, with widespread applications in video surveil-
lance, human computer interaction, robot vision, autonomous
driving and so on. Among the multiple modalities [1]–[5] that
are able to recognize human action, such as appearance, depth
and body skeletons [6], [7], the skeleton-based sequences
are springing up in recent years, due to the prevalence of
affordable depth sensors (e.g., Kinect) and effective pose esti-
mation algorithms [8]. Skeletons convey compact 3D position
information of the major body joints, which are robust to
variations of viewpoints, body scales and motion speeds [9].
Hence, skeleton-based action recognition has attracted more
and more attention [10]–[16].
Different from modalities defined on regular grids such as
images or videos, dynamic human skeletons are non-Euclidean
geometric data, which consist of a series of human joint coor-
dinates. This poses challenges in capturing both the intra-frame
Sparsified Spatio-Temporal Graph
t
Graph Regression (GR)
Input Skeleton Sequence
t
GCN
Output Classification Score
Hand
Waving
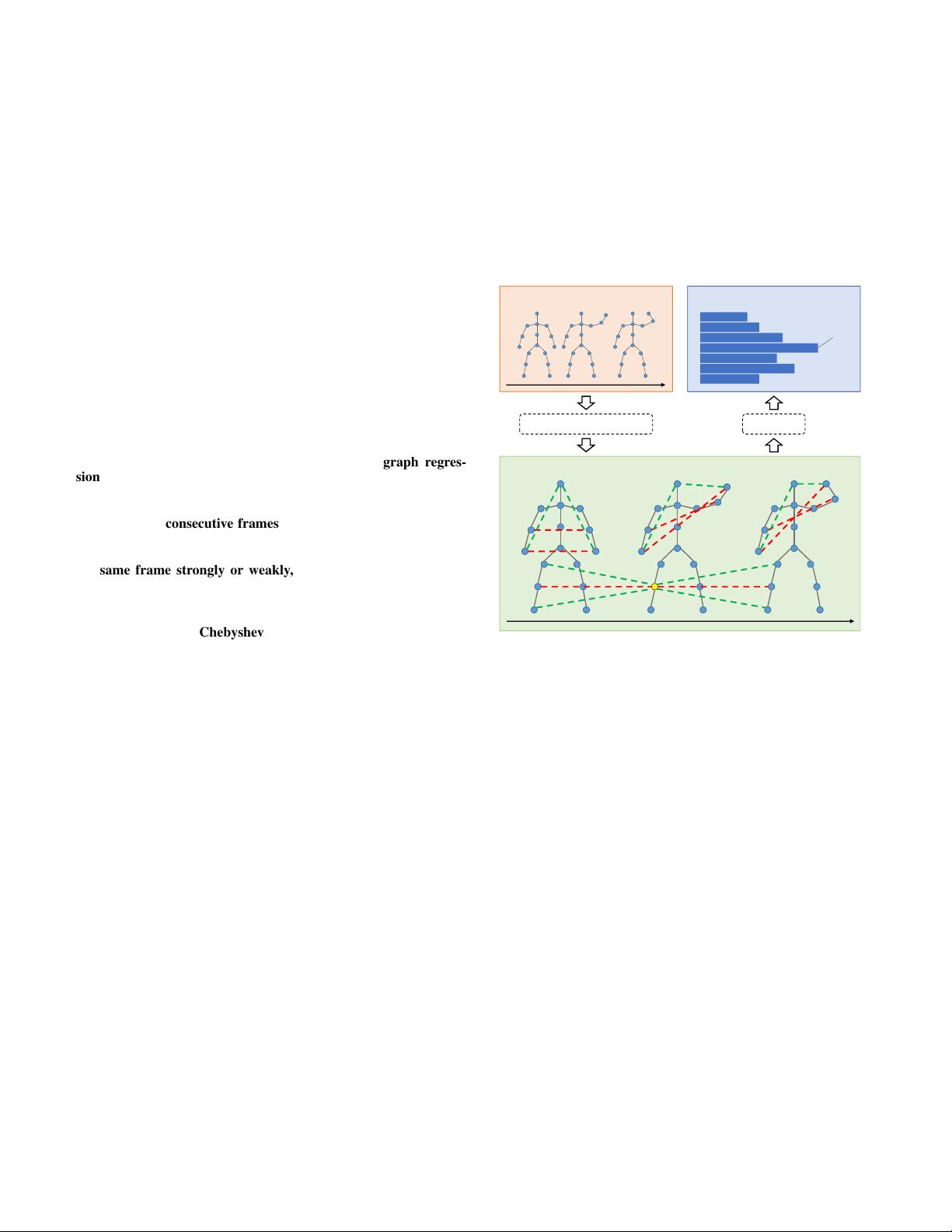
Fig. 1. The pipeline of the proposed GR-GCN for skeleton-based action
recognition. Given a sequence of human body joints, we first learn a common
sparsified spatio-temporal graph over each frame, its previous frame and the
subsequent one via graph regression. This leads to a spatio-temporal graph
with strong and physical edges (black solid lines), strong and non-physical
edges (red dashed lines) and weak edges (green dashed ones) for variation
modeling. We then feed the sparsified spatio-temporal graph into a graph
convolutional network (GCN) along with the 3D coordinates of joints for
variation learning, which leads to the output classification scores.
features and temporal dependencies. Recent methods learn
these features via deep models like recurrent neural networks
(RNN) [6], [7], [17]–[23] and convolutional neural networks
(CNN) [21], [24]–[27]. Nevertheless, the topology in skeletons
is not fully exploited in the grid-shaped representation of RNN
and CNN.
A natural way to represent skeletons is graph, where each
joint is treated as a vertex in the graph, and the relationship
among the joints is interpreted by edges with weights. As
unordered graphs cannot be fed into RNN or CNN directly,
graph convolutional networks (GCN) have been proposed to
deal with data defined on irregular graphs for a variety of
applications [28]–[31]. Yan et al. [32] and Li et al. [33] are
the first to propose graph-based skeleton representation, which
is then fed into the GCN to automatically learn the spatial
and temporal patterns from data. Tang et al. [34] propose a
arXiv:1811.12013v2 [cs.CV] 15 Apr 2019
下载后可阅读完整内容,剩余9页未读,立即下载
2019-08-01 上传
2015-04-27 上传
2021-09-11 上传
2023-12-13 上传
2023-12-01 上传
2023-05-24 上传
2023-05-10 上传
2023-07-15 上传
2023-06-08 上传

woo静
- 粉丝: 29
- 资源: 347
 我的内容管理
展开
我的内容管理
展开







最新资源
- 最优条件下三次B样条小波边缘检测算子研究
- 深入解析:wav文件格式结构
- JIRA系统配置指南:代理与SSL设置
- 入门必备:电阻电容识别全解析
- U盘制作启动盘:详细教程解决无光驱装系统难题
- Eclipse快捷键大全:提升开发效率的必备秘籍
- C++ Primer Plus中文版:深入学习C++编程必备
- Eclipse常用快捷键汇总与操作指南
- JavaScript作用域解析与面向对象基础
- 软通动力Java笔试题解析
- 自定义标签配置与使用指南
- Android Intent深度解析:组件通信与广播机制
- 增强MyEclipse代码提示功能设置教程
- x86下VMware环境中Openwrt编译与LuCI集成指南
- S3C2440A嵌入式终端电源管理系统设计探讨
- Intel DTCP-IP技术在数字家庭中的内容保护
