实时扩展空间KinectFusion:动态映射与密集三角网格构建
需积分: 11 69 浏览量
更新于2024-09-06
收藏 746KB PDF 举报
本文档探讨了"Kintinuous Spatially Extended KinectFusion"(连续扩展空间Kinect融合)这一高级算法在实时高密度三维建模领域的应用。作者Thomas Whelan、John McDonald来自爱尔兰Maynooth的National University of Ireland,而Michael Kaess、Maurice Fallon、Hordur Johannsson和John J. Leonard则来自美国麻省理工学院的Computer Science and Artificial Intelligence Laboratory (CSAIL)。
KinectFusion是一种基于Kinect传感器的实时3D重建技术,最初用于创建静态室内环境的精确模型。然而,原始算法有一定的局限性,它假设一个固定的映射区域。为了克服这个限制,本文提出了一种改进方法,允许实时动态地扩展被Kinect Fusion算法处理的空间范围。这种扩展包括以下三个关键步骤:
1. **动态区域扩展**:通过修改算法设计,使其能够适应实时变化的空间需求,不再受限于预设的固定体积。这提高了系统的灵活性,使得系统能够适应更大的场景和移动过程中的环境变化。
2. **密集点云提取**:当空间范围变化时,从新纳入的区域内获取大量点云数据。这些数据是3D重建的基础,包含了丰富的几何信息。
3. **增量三角网格构建**:将收集到的点云逐次添加到环境的三角网格模型中,实现了动态且持续的3D模型更新。这种方法不仅保持了模型的实时性,还保证了模型的细节丰富度。
为了实现这一系统,作者们构建了一个基于层次结构的多线程组件架构,这显著提升了算法的性能并使其能够在实时环境中稳定运行。这种模块化设计使得新功能的添加和集成变得简单,有助于保持系统的可扩展性和易用性。
"Kintinuous Spatially Extended KinectFusion"算法革新了传统的KinectFusion技术,为实时三维建模在大型、动态场景的应用提供了强大的工具,对于诸如机器人导航、增强现实以及虚拟现实等领域具有重要意义。
Kintinuous: Spatially Extended KinectFusion
Thomas Whelan, John McDonald
Departmen t of Computer Science, National of Ireland Mayn ooth, Co. Kildare, Ireland.
Email: Thomas.J.Whelan@nuim.ie
Michael Kaess, Maurice Fallon, H ordur Johannsson, John J. Leo nard
Computer Science and Artificial Intelligence Laboratory (CSAIL),
Massachusetts Institute of Technolo gy (MIT), Cambridge, MA 02139, USA.
Abstract—In this paper we present an extension to the
KinectFusion algorithm that permits dense mesh-based mapping
of extended scale environments in real-time. This is achieved
through (i) altering the original algorithm such that the region
of space being mapped by the KinectFusion algorithm can vary
dynamically, (ii) extracting a dense point cloud from the regions
that leave the KinectFusion volume due to this variation, and, (iii)
incrementally adding the resulting points to a triangular mesh
representation of the environment. The system is implemented
as a set of hierarchical multi-threaded components which are
capable of operating in real-time. The architecture facilitates
the creation and integration of new modules with minimal
impact on the performance on the dense volume tracking and
surface reconstruction modules. We provide experimental results
demonstrating the system’s ability to map areas considerably
beyond the scale of the original KinectFusion algorithm including
a two story apartment and an extended sequence taken from a
car at night. In order to overcome failure of the iterative closest
point (ICP) based odometry in areas of low geometric features we
have evaluated the Fast Odometry from Vision (FOVIS) system
as an alternative. We provide a comparison between the two
approaches where we show a trade off between the reduced
drift of the visual odometry approach and the higher local
mesh quality of the ICP-based approach. Finally we present
ongoing work on incorporating full simultaneous localisation and
mapping (SLAM) pose-graph optimisation.
I. INTRODUCTION
In rec e nt years visual SLAM has reached a significan t level
of maturity with a number of robust real-time so lutions being
reported in the literature [9]. Altho ugh th e se techniques permit
the construction of an acc urate map of an enviro nment, the fact
that they are feature-based means that they result in sparse
point cloud maps that ca nnot be used directly or have limited
utility in many robotic tasks (e.g. obstacle avoidance, path
planning, manipulation, etc.). This issue has motivated th e
development of dense mapping approaches that aim to use
informa tion from every pixel from the input video frames to
create 3D surface models of the environment [12, 15]. The
emergence of RGB-D cameras, and in par ticular the Microsoft
Kinect
R
, has seen this work being taken a step f urther. New-
combe et al. introduced the KinectFusion algorithm [11] which
uses a volumetric representation of the scene, known as the
truncated signed distance function (TSDF), in conjunction with
fast iterative closest point (ICP) pose estimation to provide a
real-time fused dense model of the scene at an un precedented
level of accuracy.
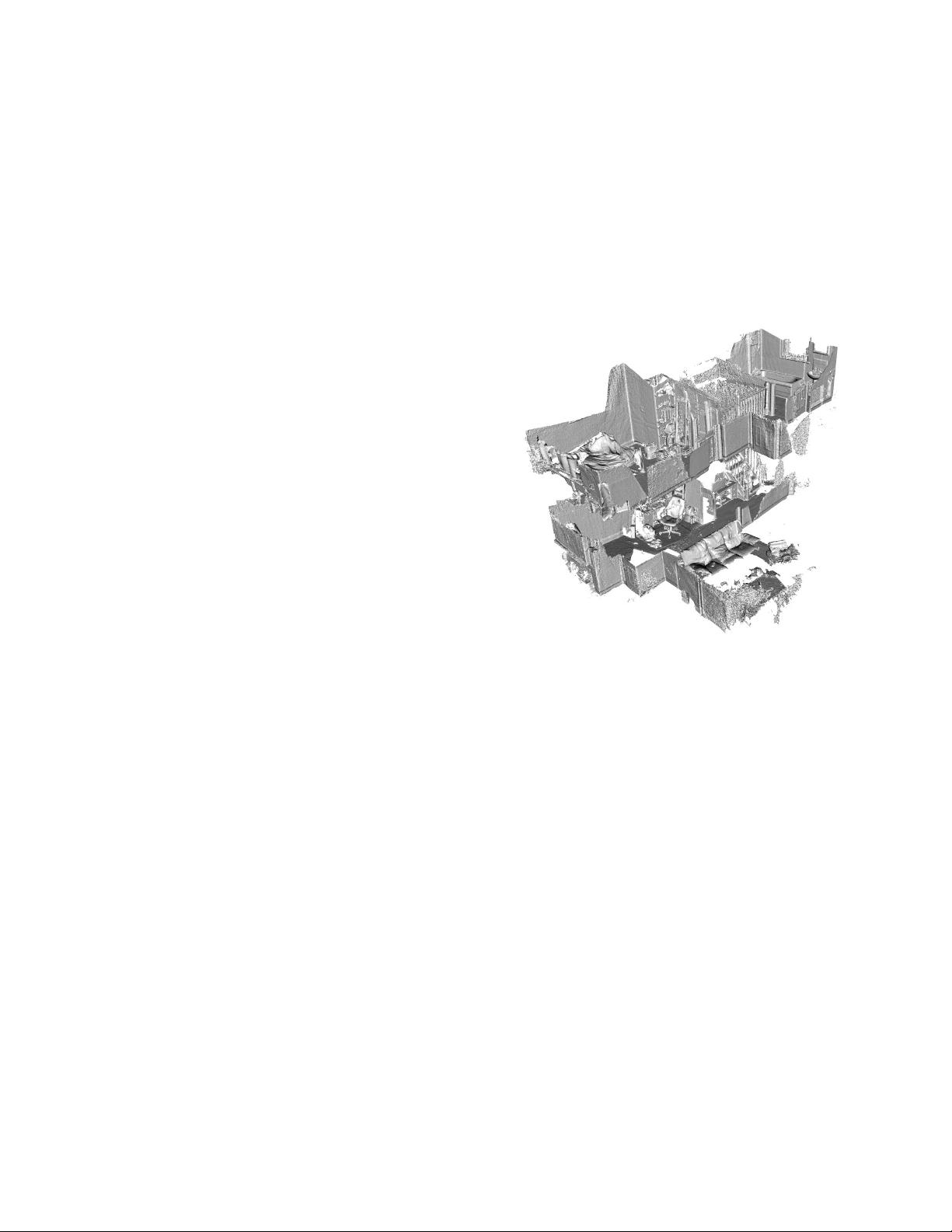
Fig. 1. Real-time 6DOF extended scale map reconstruction of a dataset
captured using a handheld Kinect traversing multiple rooms over two floors
of an apartment. (see Section V-B)
However this algorithm does suffer from a number of
limitations in part derived from the chosen unde rlying TSDF
voxel model. These limitations include an inflexible sur face
model that cannot properly model d e formation s, the ina bility
to use the system in an unbounded extend ed area and tracking
failures in env ironments with poor 3D geometry.
In this paper we present ongoing research to extend the work
of Newcombe et al. to permit KinectFusion style mapping
in an unbounded environment in r eal-time. At any point in
time our system maintains a TSDF of the region of spac e that
is currently being map ped. The region of space represented
by this TSDF varies dynamically during pr ocessing. As new
regions o f spac e enter the TSDF, previously mapped regions
are extracted into a more parsimonious triangular mesh r epre-
sentation.
We present results that demonstrate the techniqu e ’s ability
to create highly de ta iled maps of extended scale environments.
We also present some early stage work which allows the
KinectFusion tracking and surface r econstruction algorithm to
function correctly in areas with few 3 D features.
下载后可阅读完整内容,剩余7页未读,立即下载
2013-05-08 上传
2019-04-08 上传
2021-05-13 上传
2023-06-07 上传
2022-02-09 上传
2021-08-11 上传
2021-11-16 上传
2021-02-04 上传
2011-09-15 上传

zoucaiwangchina0402
- 粉丝: 1
- 资源: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- zen:Woohoo Labs。 Zen是一种非常快速,简单,符合PSR-11的DI容器和预加载文件生成器
- TKC:Projekt dalekohledu dopředmětuTKC
- 3.rar_单片机开发_C/C++_
- electronics-shop:Petto是想要宠物的人的在线宠物商店。
- PyPI 官网下载 | skygear-0.6.0.tar.gz
- ember-place-autocomplete
- 重复数据删除:用于准确,可扩展的模糊匹配,记录重复数据删除和实体解析的python库
- Citadel:渗透测试脚本的集合
- MIDletCode.zip_棋牌游戏_Java_
- MessageProcessingApplication
- 反汇编程序:借助capstone和ptrace的简单实验性反汇编程序
- Thierry-Cayman-Art:艺术家网站的Vue.js前端(Django后端)
- SpoofMAC:更改您的MAC地址以进行调试
- PHP开源api管理平台源码v1.2 带后台
- 全球顶尖j2me手机游戏揭密 pdf
- rcc:随机凯撒密码
