四自由度棒料搬运机械手设计-机械毕业设计
版权申诉
94 浏览量
更新于2024-07-01
1
收藏 1.27MB DOCX 举报
"四自由度棒料搬运机械手设计"
这篇文档详细介绍了四自由度棒料搬运机械手的毕业设计,旨在通过机械装置自动化完成棒料的搬运工作,减轻工人的劳动强度,提高生产效率和安全性。以下是设计的详细内容:
1. **绪论**:
- 工业机器人的概述与发展:文档简述了工业机器人技术的发展历程,从最初的自动化设备到现代的多功能机器人,其在制造业中的应用越来越广泛。
- 设计目标:四自由度的机械手设计是为了实现棒料的精确抓取和搬运,适用于各种工况,尤其是在环境恶劣的场合。
- 设计意义:该设计有助于提升制造业自动化水平,减少人为操作带来的风险,同时提升生产效率。
2. **机械手的总体设计**:
- 设计要求:明确了设计应满足的性能指标,如负载能力、精度、工作范围等。
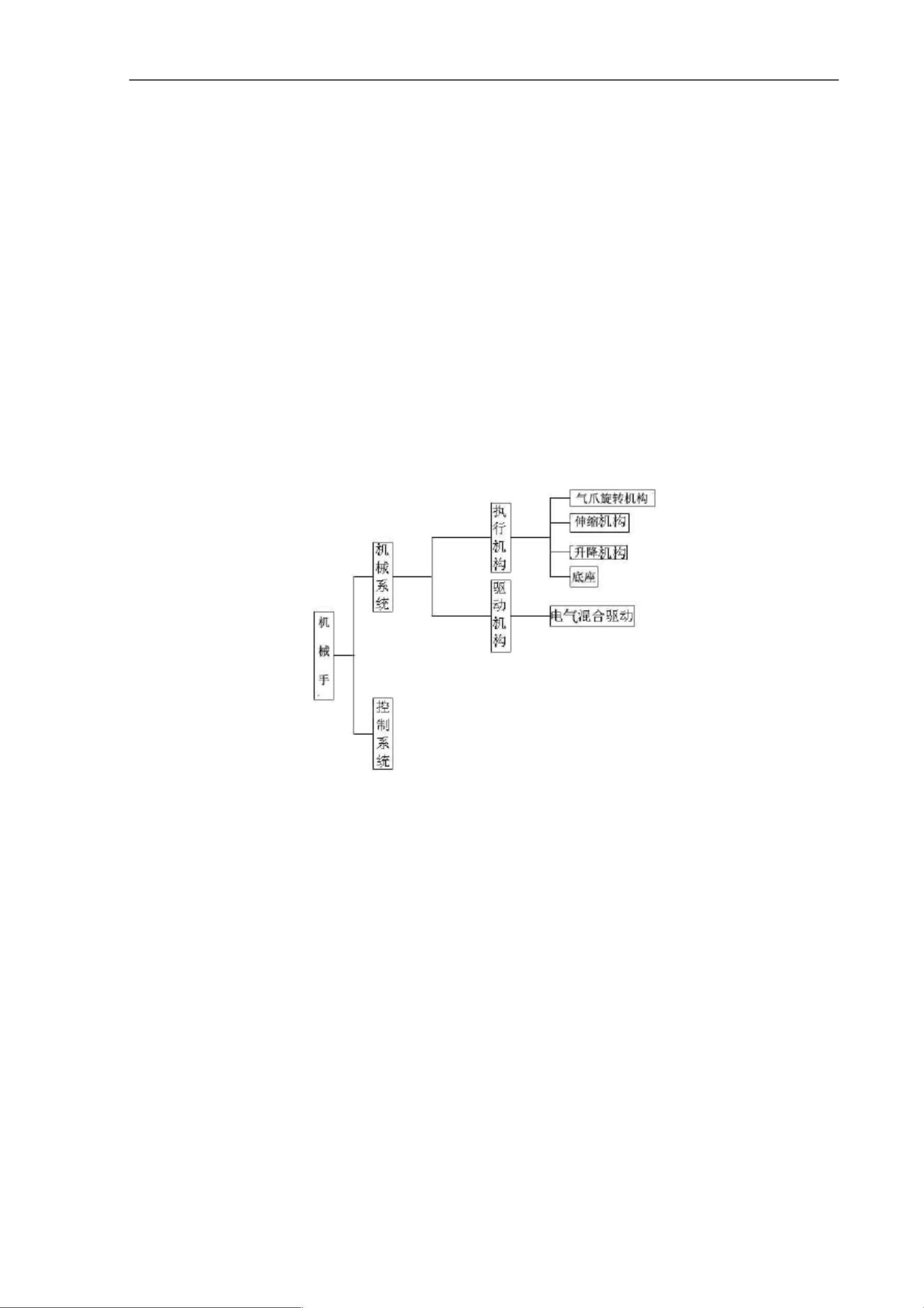
- 机器手组成:包括底座、旋转机构、手臂和末端执行器(气爪)等部分。
- 总体方案:提出了机械手的整体构想和运动方式。
- 工作空间:分析了机械手可以覆盖的操作区域。
- 驱动系统设计:包括驱动器的选择和传动机构的规划。
3. **传动设计**:
- 滚珠丝杠选择:确保直线运动的精度和效率。
- 谐波齿轮减速器:用于传递扭矩并减小转速,提高机械手的定位精度。
4. **电动机的选择**:
- 步进电机的选择:用于手臂的升降动作,考虑其扭矩、速度和精度要求。
- 底座回转驱动电动机:选择适合驱动底座旋转的电动机,考虑载荷和动态性能。
5. **气动件的设计计算**:
- 气爪夹紧力计算:根据棒料尺寸和材质确定气爪所需的夹紧力。
- 气缸选择:依据计算结果确定缸径、行程和速度,确保气爪动作稳定可靠。
- 摆动气缸和手臂伸缩气缸的选择:分别用于气爪的开合和手臂的伸缩运动。
6. **控制系统设计**:
- 控制器选择:选择适合的机械手控制器,实现对机械手的精确控制。
- 控制系统特点和要求:强调控制系统需具备高精度、稳定性强、易操作等特点。
7. **验算与参数**:
- 手臂平衡验算:确保机械手在不同位置下的稳定性。
- 机械手参数:详细列出各项设计参数,如手臂长度、关节角度等。
8. **设计总结**和**鸣谢**:对整个设计过程进行回顾,感谢指导教师和相关人员的支持。
这份毕业设计全面涵盖了机械手从概念到实施的各个环节,包括理论分析、组件选择、结构设计、控制系统构建以及性能验证,充分体现了机械设计制造及其自动化领域的综合应用。

00
够根据人给出的指令认识自身和周围的环境,识别对象的有无及其状态,再根据这一识
别自动选择程序进行操作,完成规定的任务。并且能跟踪工作对象的变化,具有适应工
作环境的功能。这种机器人还处于研制阶段,尚未大量投入工业应用。
世界上工业机器人萌芽于 50 年代的美国,经过 40 多年的发展,已被不断地应用于
人类社会很多领域,正如计算机技术一样,机器人技术正在日益改变着我们的生产方式。
进入 90 年代,世界机器人工业继续稳步增长,每年增长率保持在 10%左右,世界上
已拥有机器人数量达到 70 万台左右,1992、1993 年世界机器人市场曾一度出现小的低
谷,近年除日本外,欧美机器人市场也开始复苏,并日益兴旺。与全球机器人市场一样,
中国机器人市场也逐渐活跃,1997 年上半年,我国从事机器人及相关技术产品研制、生
产的单位已达 200 家,研制生产的各类工业机器人约有 410 台,其中已用于生产的约占
3/4。目前全国约有机器人用户 500 家,拥有的工业机器人总台数约为 1200 台,其中从
40 家外国公司进口的各类机器人占 2/3 以上,并每年以 100~150 台的速度增加。
从机器人的应用与发展来看,在很多方面工业机器人代替人力劳动已是必然的趋
势,工业机器人将来必定有广阔的发展前景。
1.2 本设计中的四自由度棒料搬运机械手所实现的功能
本设计中的四自由度棒料搬运机械手,主要是针对质量少于 2KG 的圆形棒料的搬运。
本设计中的机械手有四个自由度,由底座的旋转,手臂的升降,手臂的伸缩,手爪的旋
转组成。本设计中的机械手是一种通用型棒料搬运机械手。通过气爪手指的不同选择可
满足小于直径 60mm 的棒料的搬运。通过示教再现或程序的直接控制可实现在机械手工
作范围内把棒料从指定点搬运到另一指定点,并把棒料翻转过来。通过对机械手的相应
控制还可实现对棒料的排列。
1.3 本设计中的四自由度棒料搬运机械手设计的意义
机器人工程是近二十多年迅速发展起来的,目前已应用与许多生产领域。由目前的
发展状况看,在可预见的将来它将在生产中扮演越来越重要的角色。本机械手就是基于
此并为提高劳动生产率、产品质量和经济效益,减轻工人劳动强度而设计的。在某些劳
动条件极其恶劣的条件下,工人难以用手工工作,可用本机械手代替人力劳动。在社会
不断发展的今天,机器人在工业现场中的应用也越来越广泛,用机器的力量代替人力,
而将人类从繁重的体力劳动中解放出来是历史发展的趋势。
- 2 -
剩余36页未读,继续阅读
2022-07-12 上传
2022-07-12 上传
2022-07-12 上传
2022-07-12 上传
点击了解资源详情
点击了解资源详情
2022-07-12 上传

不吃鸳鸯锅
- 粉丝: 8548
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 將動漫花園資源網的搜尋複製為rss訂閱網址-crx插件
- SpringBoot-REST-API:提供REST API服务的SpringBoot应用程序的演示
- AirHerz:物联网生物识别人力资源管理小部件,以提高生产力,由Airtable模块提供支持
- 测试:测试任务
- IOE4U-crx插件
- mobile-apps-data:我的移动应用程序的数据实用程序
- happy halloween万圣节PPT模板
- 编程课程+GO语言编程+技术开发+系列课程
- 全图格式:标准图全格式代码-matlab开发
- 钢结构施工组织设计-地下变电室工程施工组织设计方案范本
- my-first-webpage
- alx-system_engineering-devops:关于shell
- twig-cache-extension
- anthonytliu.github.io
- 施工组织设计常用流程图集-龙门吊架梁施工工艺流程图
- com.certicamara.singleonsign-crx插件
