
572 IEEE TRANSACTIONS ON NEURAL NETWORKS AND LEARNING SYSTEMS, VOL. 28, NO. 3, MARCH 2017
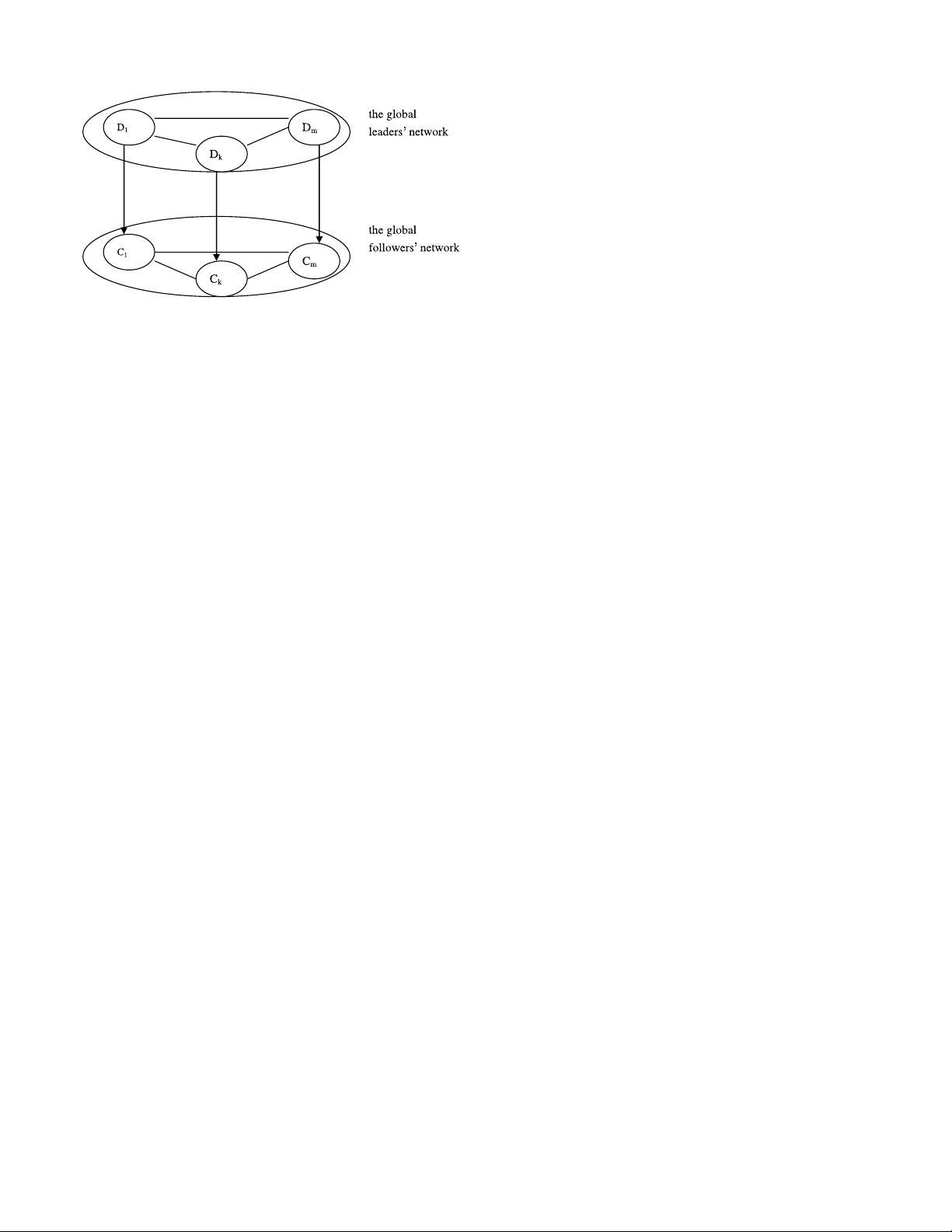
Fig. 1. Network structure diagram constructed by m leaders’ subnetworks
and m matching followers’ subnetworks.
they can only communicate with each other within the same
subnetwork. In addition, the leaders are only responsible for
providing the related information, such as the necessary priori
knowledge or professional skills, to their matching followers;
while the responsibilities of the pinned followers are to not
only receive information from their leaders but also organize
other followers belonging to the same or different subnetworks
to complete a certain task in a mutually cooperative way. The
corresponding network structure diagram is shown in Fig. 1.
Assume that the complex networks are composed of a global
followers’ network and a global leaders’ network, where the
global followers’ network contains m followers’ subnetworks
C
1
, C
2
,...,C
m
and the global leaders’ network contains
m matching leaders’ subnetworks D
1
, D
2
,...,D
m
.Asshown
in Fig. 1, the nodes in the kth followers’ subnetwork C
k
can
be represented as r
k−1
+ 1, r
k−1
+ 2,...,r
k
and the ones in
the kth matching leaders’ subnetwork D
k
can be represented
as w
k−1
+ 1,w
k−1
+ 2,...,w
k
,wherek = 1, 2,...,m.The
kth followers’ subnetwork has N
k
= r
k
− r
k−1
nodes and
the kth matching leaders’ subnetwork has M
k
= w
k
− w
k−1
nodes, where r
0
= 0, r
m
= N,w
0
= 0, and w
m
= M; thus,
we have
m
k=1
N
k
= N and
m
k=1
M
k
= M.Thatistosay,
N represents the total number of nodes in the global followers’
network and M represents the total number of nodes in the
global leaders’ network. In order to assign these N followers
and M leaders to m followers’ subnetworks and m matching
leaders’ subnetworks, respectively, we can introduce a map-
ping function, namely, μ :{1, 2,...,N} or {1, 2,...,M}→
{1, 2,...,m} to deal with it. If node i belongs to the
jth subnetwork, then we have μ(i) = μ
i
= j. Consider
the global followers’ network consisting of N nonidentical
nodes with stochastic disturbances. The dynamic behavior of
the ith node can be described by the following stochastic delay
differential equation:
dx
i
(t) =
⎡
⎣
A
μ
i
x
i
(t) + f
μ
i
(t, x
i
(t), x
i
(t − τ
t
))
+ c
N
j=1
b
(μ
i
)
ij
g(x
j
(t))
⎤
⎦
dt
+ δ(t, x
i
(t), x
i
(t − τ
t
))dω, i = 1, 2,...,N (1)
where x
i
(t) = (x
i1
(t), x
i2
(t),...,x
in
(t))
T
∈ R
n
represents
the state vector of node i, A
μ
i
denotes a negative definite
matrix, f
μ
i
(t, x
i
(t), x
i
(t − τ
t
)) :[0, +∞] × R
n
× R
n
→ R
n
is a continuously differentiable vector function that describes
the local dynamics of the nodes in the μ
i
th followers’ subnet-
work, τ
t
is a continuously differentiable time-varying delay,
c is a coupling strength, = diag{γ
1
,γ
2
,...,γ
n
} is an
inner coupling matrix that satisfies the condition ≥ I
n
.
B
(μ
i
)
= (b
(μ
i
)
ij
) ∈ R
N
μ
i
×N
is the coupling configuration matrix
representing the topological structure of the μ
i
th followers’
subnetwork, which can be stated as follows: 1) when μ
j
= μ
i
and j = i,thenb
(μ
i
)
ij
= b
(μ
i
)
ii
=−
r
μ
i
k=r
μ
i
−1
+1,k=i
b
(μ
i
)
ik
< 0;
2) when μ
j
= μ
i
and j = i, and if the node i receives the
information from the node j directly, then b
(μ
i
)
ij
= b
(μ
i
)
ji
> 0;
otherwise, b
(μ
i
)
ij
= b
(μ
i
)
ji
= 0; and 3) when μ
j
= μ
i
,
and if the node i receives the information from the node j
directly, then b
(μ
i
)
ij
= 0(b
(μ
i
)
ij
> 0orb
(μ
i
)
ij
< 0); otherwise,
b
(μ
i
)
ij
= 0, and it satisfies the condition
r
μ
j
k=r
μ
j
−1
+1
b
(μ
i
)
ik
= 0.
B =[B
(1)T
B
(2)T
... B
(m)T
]
T
∈ R
N×N
is the coupling
configuration representing the topological structure of the
global followers’ network, as the global followers’ network is
undirected, and thus, the matrix B is symmetric. g(x
j
(t)) :
R
n
→ R
n
is a nonlinear coupling function. ω(t) =
(ω
1
(t), ω
2
(t),...,ω
n
(t))
T
is an n-dimensional wiener process
defined on a complete probability space (, F, P),where
is the sample space, F is the σ -algebra of subsets of the
sample space, and P is the probability measure on F,and
it satisfies the conditions E{dω}=0andE{(dω)
2
}=dt.
δ :[0, +∞] × R
n
× R
n
→ R
n×n
is the noise intensity function
matrix. This type of stochastic perturbation can be regarded
as a result from the occurrence of random uncertainties that
affect the dynamic behaviors of the complex networks.
As we know, sometimes network (1) may not reach syn-
chronization by its own, and with the increase of network size,
it is not realistic to add controllers to all nodes for realizing the
cluster synchronization of network (1). To save control cost,
we can apply some control actions to just a small fraction of
nodes, which is known as pinning control. Without loss of
generality, we can rearrange the order of the nodes in the
μ
i
th followers’ subnetwork, and let the first l
μ
i
nodes be
controlled. Therefore, the pinning-controlled μ
i
th followers’
subnetwork with the influence of stochastic factors can be
written as
dx
(μ
i
)
i
(t) =
⎡
⎣
A
μ
i
x
(μ
i
)
i
(t) + f
μ
i
t, x
(μ
i
)
i
(t), x
(μ
i
)
i
(t − τ
t
)
+ c
N
j=1
b
(μ
i
)
ij
g(x
j
(t)) + u
(μ
i
)
i
(t)
⎤
⎦
dt
+ δ
t, x
(μ
i
)
i
(t), x
(μ
i
)
i
(t − τ
t
)
dω
i = r
μ
i
−1
+ 1,...,l
μ
i
dx
(μ
i
)
i
(t) =
⎡
⎣
A
μ
i
x
(μ
i
)
i
(t) + f
μ
i
t, x
(μ
i
)
i
(t), x
(μ
i
)
i
(t − τ
t
)
+ c
N
j=1
b
(μ
i
)
ij
g(x
j
(t))
⎤
⎦
dt
+ δ
t, x
(μ
i
)
i
(t), x
(μ
i
)
i
(t − τ
t
)
dω
i = l
μ
i
+ 1,...,r
μ
i
(2)
剩余13页未读,继续阅读

weixin_38717450
- 粉丝: 7
- 资源: 952
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++标准程序库:权威指南
- Java解惑:奇数判断误区与改进方法
- C++编程必读:20种设计模式详解与实战
- LM3S8962微控制器数据手册
- 51单片机C语言实战教程:从入门到精通
- Spring3.0权威指南:JavaEE6实战
- Win32多线程程序设计详解
- Lucene2.9.1开发全攻略:从环境配置到索引创建
- 内存虚拟硬盘技术:提升电脑速度的秘密武器
- Java操作数据库:保存与显示图片到数据库及页面
- ISO14001:2004环境管理体系要求详解
- ShopExV4.8二次开发详解
- 企业形象与产品推广一站式网站建设技术方案揭秘
- Shopex二次开发:触发器与控制器重定向技术详解
- FPGA开发实战指南:创新设计与进阶技巧
- ShopExV4.8二次开发入门:解决升级问题与功能扩展
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


