机器人控制与运动规划解析
版权申诉
59 浏览量
更新于2024-07-01
收藏 12.82MB PDF 举报
"机器人技术基础:机器人控制和运动规划.pdf"
在机器人技术中,控制和运动规划是核心领域,涉及到如何精确地操作机器人以及如何让其按照预设的路径执行任务。位置控制是机器人控制的基本任务,它关注的是机器人末端执行器在空间中的位置和姿态。根据控制方式的不同,可以分为点位(PTP)控制和连续(CP)控制。
点位控制(PTP)主要应用于简单任务,如搬运和送料,它只需要机器人从一个点移动到另一个点,而不在乎两点之间的路径。这种控制方式相对简单,适用于对路径精度要求不高的场景。
连续路径控制(CP)则更为复杂,它要求机器人不仅要在目标点达到精确位置,还要沿着期望的轨迹运动。这通常用于需要高精度路径跟踪的任务,例如弧焊和喷漆。为了实现连续路径控制,机器人需要进行多轴协调控制,确保各个轴的速度和加速度连续,以形成平滑的轨迹。
在运动规划中,有分时控制和同时控制两种策略。分时控制通过依次驱动不同轴来逼近直线轨迹,但这种方法理论上无法生成完美的直线。相反,同时控制允许两个或更多轴的驱动电机同步运行,从而合成出期望的轨迹,这种方式更适用于需要直线或曲线运动的情况。
多轴协调控制是机器人运动控制的关键,尤其对于多关节机器人,它要求各个轴的速度和加速度协同工作,以保证运动的连续性。例如,在X轴的运动过程中,从起点S0加速到最大速度Vmax,然后在接近终点S3时逐渐减速直至停止,这个过程需要考虑到机构的物理限制和驱动电机的能力。
单自由度的运动轨迹和速度控制展示了如何管理单一轴的运动,比如X轴在S0到S1之间加速,然后在S2到S3之间减速,以确保整个过程的平稳过渡。这种控制策略在设计机器人的运动规划时至关重要,因为它直接影响到机器人的动作流畅性和任务执行的效率。
机器人控制和运动规划涉及了从基本的位置控制到复杂的路径规划和多轴协调,这些都是实现机器人自主、高效和精确操作的基础。理解并掌握这些概念和技术对于开发和应用机器人系统至关重要。
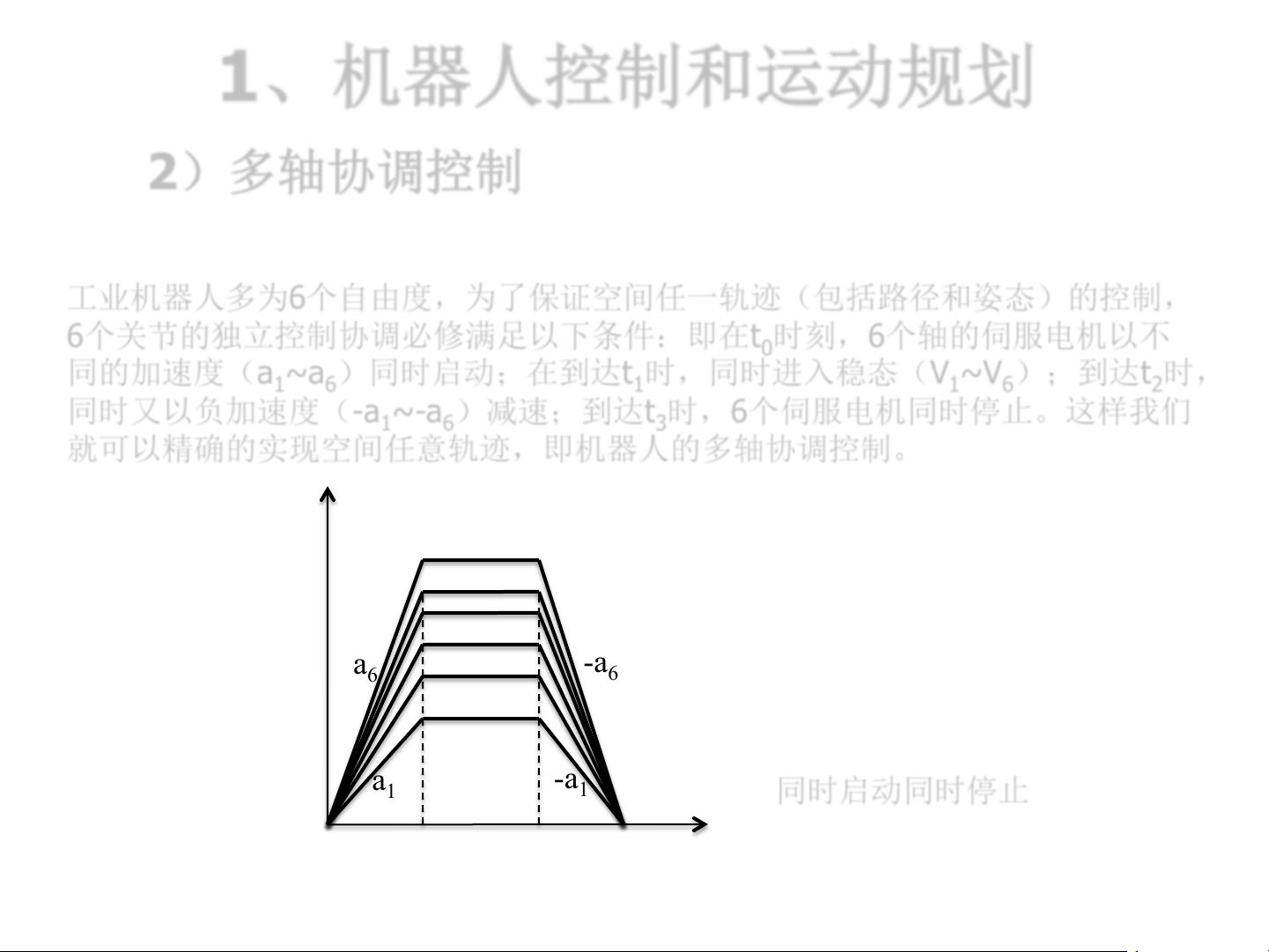
工业机器人多为6个自由度,为了保证空间任一轨迹(包括路径和姿态)的控制,
6个关节的独立控制协调必修满足以下条件:即在t
0
时刻,6个轴的伺服电机以不
同的加速度(a
1
~a
6
)同时启动;在到达t
1
时,同时进入稳态(V
1
~V
6
);到达t
2
时,
同时又以负加速度(-a
1
~-a
6
)减速;到达t
3
时,6个伺服电机同时停止。这样我们
就可以精确的实现空间任意轨迹,即机器人的多轴协调控制。
2)多轴协调控制
1、机器人控制和运动规划
同时启动同时停止
t
V
0
o
V
6
t
0
t
1
t
2
t
3
a
1
-a
1
a
6
-a
6
V
1

剩余31页未读,继续阅读
2021-09-29 上传
2021-09-17 上传
2021-09-17 上传
2023-06-15 上传
2023-07-02 上传
2023-08-04 上传
2023-09-11 上传
2023-06-15 上传
2023-06-23 上传

wxg520cxl
- 粉丝: 24
- 资源: 3万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入理解23种设计模式
- 制作与调试:声控开关电路详解
- 腾讯2008年软件开发笔试题解析
- WebService开发指南:从入门到精通
- 栈数据结构实现的密码设置算法
- 提升逻辑与英语能力:揭秘IBM笔试核心词汇及题型
- SOPC技术探索:理论与实践
- 计算图中节点介数中心性的函数
- 电子元器件详解:电阻、电容、电感与传感器
- MIT经典:统计自然语言处理基础
- CMD命令大全详解与实用指南
- 数据结构复习重点:逻辑结构与存储结构
- ACM算法必读书籍推荐:权威指南与实战解析
- Ubuntu命令行与终端:从Shell到rxvt-unicode
- 深入理解VC_MFC编程:窗口、类、消息处理与绘图
- AT89S52单片机实现的温湿度智能检测与控制系统
