最优匹配算法与目标跟踪:匈牙利算法解析
101 浏览量
更新于2024-01-28
1
收藏 4.89MB PPTX 举报
方法"。
匈牙利方法是一种经典的目标跟踪算法,主要用于解决匹配问题。在目标跟踪中,通常需要将当前帧中的目标与之前帧中的目标进行匹配,从而确定目标的运动轨迹。而匈牙利方法则提供了一种有效的解决方案,可以在时间复杂度为O(n^3)的情况下实现最优匹配。
匈牙利方法的核心思想是通过建立一个匹配矩阵来表示目标之间的相似程度。匹配矩阵的每个元素表示当前帧中的一个目标与之前帧中的一个目标的相似程度。然后,通过不断调整匹配矩阵中的元素,找到一种最佳匹配方案,使得目标之间的总相似度最大化。
具体实现匈牙利方法需要以下步骤:
1. 构建匹配矩阵:将当前帧中的目标与之前帧中的目标进行两两比较,计算它们之间的相似度,并将结果存储在匹配矩阵中。
2. 进行匹配:根据匹配矩阵,通过一定的规则进行匹配。匈牙利方法采用了一个贪心算法,即每次选择匹配矩阵中相似度最高的目标进行匹配。并在每次匹配后更新匹配矩阵,排除已经匹配的目标。
3. 重复匹配:重复执行步骤2,直到所有的目标都匹配完毕。这样就可以得到最佳匹配方案,确定目标的运动轨迹。
匈牙利方法的主要优点是在保证最优解的情况下,能够在较短的时间内完成匹配。对于目标跟踪来说,时间是非常关键的,因为需要实时更新目标的位置信息。此外,匈牙利方法还可以处理目标数量不一致的情况,即当前帧中的目标数量可以与之前帧中的目标数量不同。
然而,匈牙利方法也存在一些缺点。首先,其时间复杂度较高,随着目标数量的增加,计算量也会随之增加。其次,匹配矩阵的构建需要考虑目标之间的相似度,这对于目标跟踪而言是一个比较复杂的问题。另外,匈牙利方法对目标的运动速度比较敏感,在目标快速移动或者运动模式发生变化时,可能导致匹配结果不准确。
综上所述,匈牙利方法是一种经典有效的目标跟踪算法,尤其适用于目标数量不一致、时间关键的应用场景。然而,在实际应用中,还需要根据具体情况选择合适的方法,并结合其他算法来实现更准确、高效的目标跟踪。
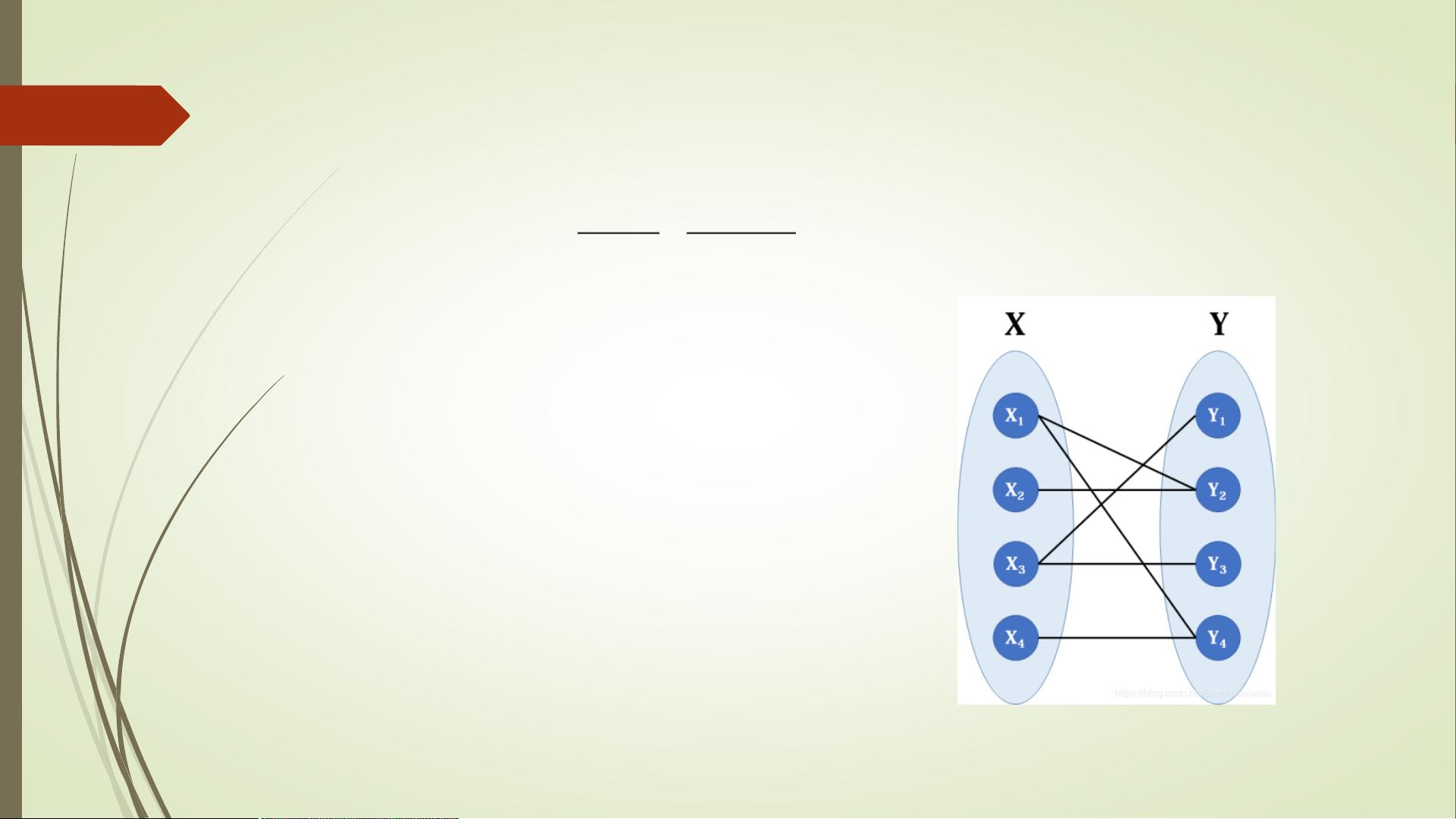
1. 匈牙利算法基本概念
匈牙利算法是一种寻找二分图的最大匹配的算法;在多目标跟踪中可以理解为寻找
前后两帧的若干目标的匹配最优解的一种算法;
什么是最优匹配?
最优匹配又称为带权最大匹配,是指在带有
权值边的二分图中,求一个匹配使得匹配边上的
权值和最大。最优匹配也是一个完备匹配,即每
个顶点都被匹配。如果X和Y集合顶点个数不相等,
可以通过补点加0边实现转化,一般使用KM算法
解决该问题。

剩余32页未读,继续阅读
117 浏览量
274 浏览量
2021-09-16 上传


深耕智能驾驶
- 粉丝: 1802
 我的内容管理
展开
我的内容管理
展开







最新资源
- 经典J2ME坦克对战游戏:回顾与介绍
- ZAProxy自动化工具集合:提升Web安全测试效率
- 破解Steel Belted Radius 5.3安全验证工具
- Python实现的德文惠斯特游戏—开源项目
- 聚客下载系统:体验极速下载的革命
- 重力与滑动弹球封装的Swift动画库实现
- C语言控制P0口LED点亮状态教程及源码
- VB6中使用SQLite实现列表查询的示例教程
- CMSearch:在CraftMania服务器上快速搜索玩家的Web应用
- 在VB.net中实现Code128条形码绘制教程
- Java SE Swing入门实例分析
- Java编程语言设计课程:自动机的构建与最小化算法实现
- SI9000阻抗计算软件:硬件工程师的高频信号分析利器
- 三大框架整合教程:S2SH初学者快速入门
- PHP后台管理自动化生成工具的使用与资源分享
- C#开发的多线程控制台贪吃蛇游戏源码解析
