
16 / 131 Issued: 16.08.2012 Version: KSS 8.1, 8.2, 8.3 Systemvariablen V2 en (PDF)
System Variables
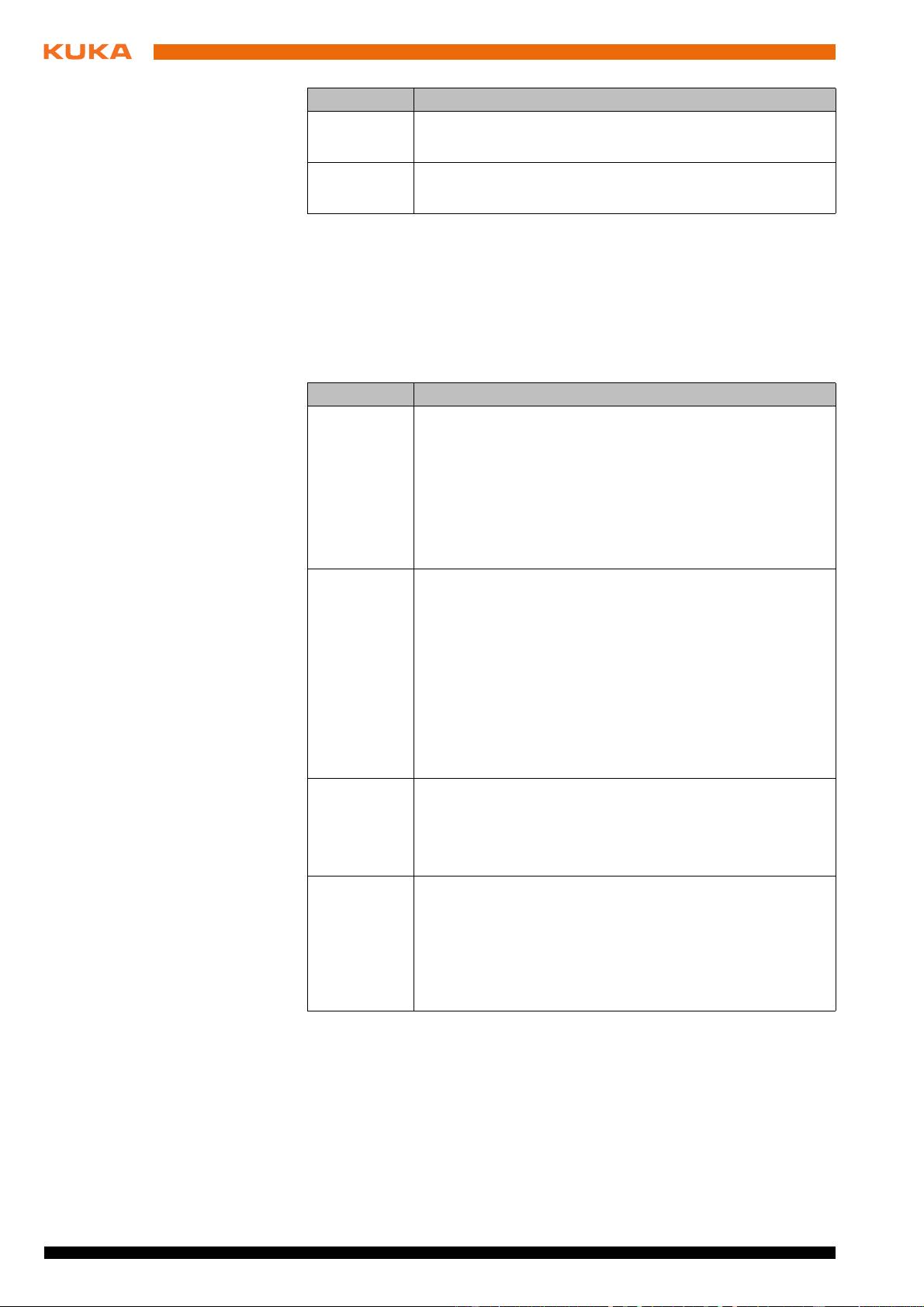
3.9 $ACC_CAR_MAX
Description Maximum Cartesian acceleration
The variable of structure type ACC_CAR saves the value of the highest mag-
nitude that the Cartesian acceleration $ACC_CAR_ACT reaches.
X, Y, Z: Cartesian acceleration for X, Y, Z in [m/s
2
]
A, B, C: Cartesian acceleration for A, B, C in [°/s
2
]. This acceleration is not
be evaluated.
ABS: Overall Cartesian acceleration in the XYZ space, i.e. relative to the
absolute value of the acceleration in X, Y, Z in [m/s
2
]
Example The variable can be set to zero in the KRL program in order to determine the
maximum values.
3.10 $ACC_EXTAX
Description Acceleration of the external axes in the advance run
The variable contains the planned axis acceleration as a percentage. In the
case of motions planned using the dynamic model, the percentage value re-
fers to the axis torque available for acceleration.
If no dynamic model is available, the percentage value refers to the maximum
acceleration values defined by means of $RAISE_TIME in the machine data
(variable in the file …R1\Mada\$machine.dat).
Syntax $ACC_EXTAX[
Axis number]=Acceleration
Explanation of
the syntax
3.11 $ACC_EXTAX_C
Description Acceleration of the external axes in the main run
The variable contains the axis acceleration of the motion currently being exe-
cuted as a percentage value. In the case of motions planned using the dynam-
ic model, the percentage value refers to the axis torque available for
acceleration.
If no dynamic model is available, the percentage value refers to the maximum
acceleration values defined by means of $RAISE_TIME in the machine data
(variable in the file …R1\Mada\$machine.dat).
Further information about the machine data can be found in the ma-
chine data documentation.
$ACC_CAR_MAX={X 0.0, Y 0.0, Z 0.0, A 0.0, B 0.0, C 0.0 ABS 0.0}
Element Description
Axis number
Type: INT
1 … 6: External axis E1 … E6
Acceleration
Type: INT; unit: %
1 … 100
The variable is write-protected and can only be read.
剩余130页未读,继续阅读

过去和未来
- 粉丝: 5
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- BGP协议首选值(PrefVal)属性与模拟组网实验
- C#实现VS***单元测试coverage文件转xml工具
- NX二次开发:UF_DRF_ask_weld_symbol函数详解与应用
- 从机FIFO的Verilog代码实现分析
- C语言制作键盘反应力训练游戏源代码
- 简约风格毕业论文答辩演示模板
- Qt6 QML教程:动态创建与销毁对象的示例源码解析
- NX二次开发函数介绍:UF_DRF_count_text_substring
- 获取inspect.exe:Windows桌面元素查看与自动化工具
- C语言开发的大丰收游戏源代码及论文完整展示
- 掌握NX二次开发:UF_DRF_create_3pt_cline_fbolt函数应用指南
- MobaXterm:超越Xshell的远程连接利器
- 创新手绘粉笔效果在毕业答辩中的应用
- 学生管理系统源码压缩包下载
- 深入解析NX二次开发函数UF-DRF-create-3pt-cline-fcir
- LabVIEW用户登录管理程序:注册、密码、登录与安全
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


