四轴飞行器轨迹生成与控制研究
需积分: 50 73 浏览量
更新于2024-07-19
收藏 13.98MB PDF 举报
"这篇论文是关于四旋翼无人机(Trajectory Generation and Control for Quadrotors)的研究,由Daniel Warren Mellinger在宾夕法尼亚大学撰写。论文探讨了四旋翼飞行器的控制技术,以及单个和多个四旋翼协同运输负载的方法,同时也涉及了单个和多个四旋翼的轨迹生成技术。"
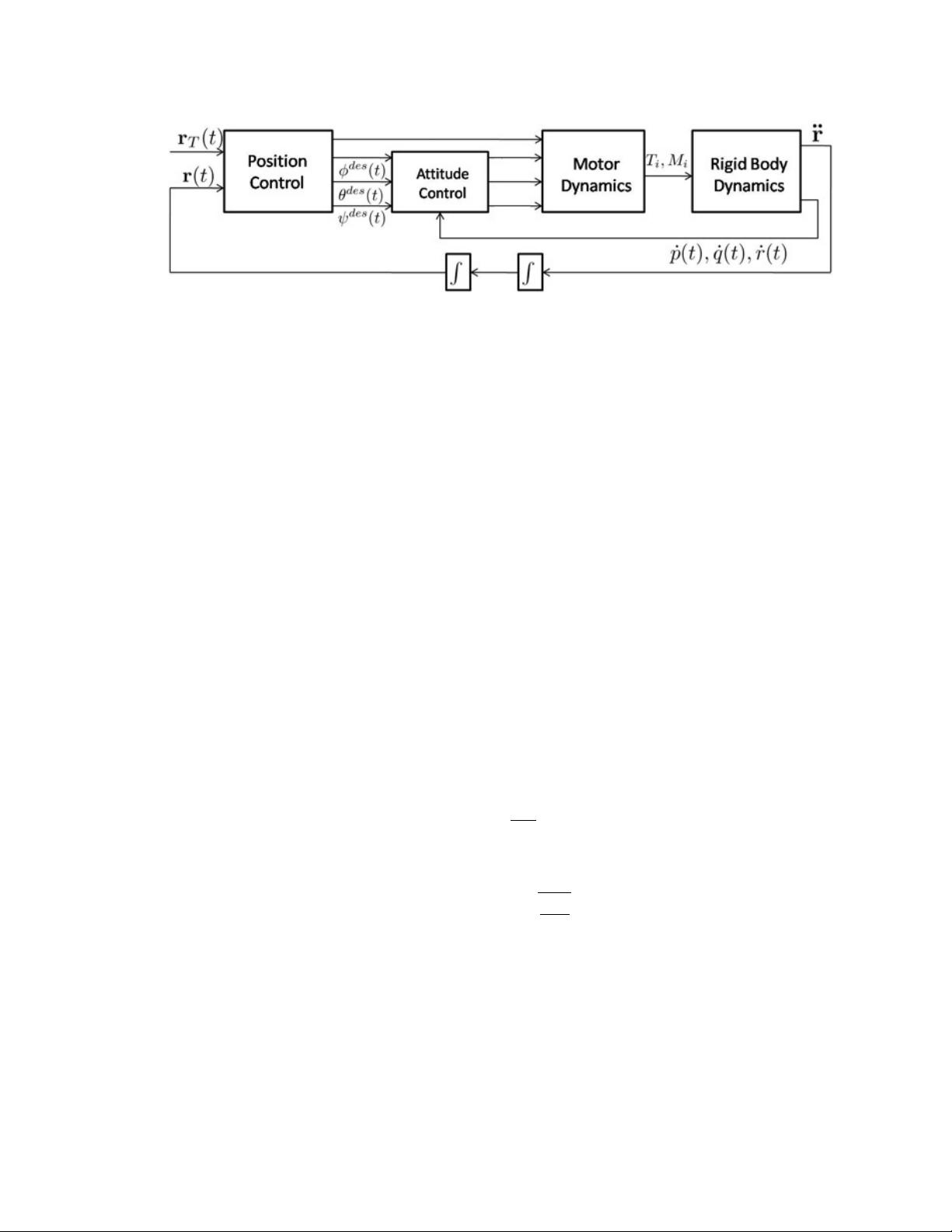
四旋翼无人机控制:在第二章中,作者描述了一种控制器设计,这种控制器能处理大的滚转和俯仰角,使得四旋翼无人机能够在需要大加速度的情况下跟随轨迹运动,并且能够从极端的初始条件中恢复过来。这表明研究着重于提高四旋翼无人机的机动性和稳定性,特别是在执行高动态任务时。
协同运输负载:第三章讨论了如何让四旋翼无人机团队协作,共同搬运他们单独无法承载的重物。这种方法利用了团队合作的力量,扩展了四旋翼无人机的应用场景,可能涉及到负载分配、协同策略和通信协议。
在线参数估计:第四章中,作者提出了一种在线参数估计方法,用于在四旋翼无人机搬运负载时实时更新其状态。通过利用无人机的动力学特性,无人机可以学习到其所携带负载的特性,并据此调整控制律以优化追踪性能。这展示了动态适应控制在实际应用中的重要性。
轨迹生成:第五章介绍了使四旋翼无人机能够以各种角度穿越狭窄间隙并在倾斜表面上着陆的轨迹生成技术。这涉及到了高精度导航和避障策略。
动态最优轨迹规划:第六章则讨论了通过预定义的路径点和安全走廊生成动态最优轨迹的方法,旨在确保四旋翼无人机高效、安全地移动。
多无人机队形快速重组:第七章将这一方法扩展到异构四旋翼无人机团队,使得它们能快速重新配置队形并避开少量障碍物。这涉及到了多无人机系统协调控制和智能路径规划。
这篇论文深入研究了四旋翼无人机的控制与轨迹生成技术,涵盖了从单个无人机的高动态飞行控制,到多无人机协同运输和队形调整等多个方面,对于提升无人机在复杂环境下的自主性能具有重要意义。

building a physically accurate model in SolidWorks. The angular acceleration determined
by the Euler equations is
I
˙p
˙q
˙r
=
L(F
2
− F
4
)
L(F
3
− F
1
)
M
1
− M
2
+ M
3
− M
4
−
p
q
r
× I
p
q
r
. (2.2)
2.1.2 Motor Model
Each rotor has an angular speed ω
i
and produces a vertical force F
i
according to
F
i
= k
F
ω
2
i
. (2.3)
Experimentation with a fixed rotor at steady-state shows that k
F
≈ 6.11 × 10
−8
N
rpm
2
. The
rotors also produce a moment according to
M
i
= k
M
ω
2
i
. (2.4)
The constant, k
M
, is determined to be about 1.5 × 10
−9
Nm
rpm
2
by matching the performance
of the simulation to the real system.
The exact relationship between the actual and commanded motor speed is a compli-
cated function of the motor controller and the propeller and motor dynamics. The true
performance is a function of the speed of the rotor and whether the speed is increasing or
decreasing. However, for simplicity a simple first order motor model is used for controller
development and simulation throughout this work. The rotor speed is approximately re-
lated to the commanded speed by a first-order differential equation
˙ω
i
= k
m
(w
des
i
− w
i
).
This motor gain, k
m
, is found to be about 20 s
−1
by matching the performance of the sim-
ulation to the real system. The desired angular velocities, ω
des
i
, are limited to a minimum
and maximum value determined through experimentation to be approximately 1200 rpm
and 7800 rpm.
8



剩余136页未读,继续阅读
2328 浏览量
861 浏览量
761 浏览量
2022-11-11 上传
118 浏览量
161 浏览量
2023-10-04 上传
2021-02-10 上传
2022-08-04 上传

鹏c
- 粉丝: 11
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- 《J2ME在移动设备上的应用》
- linux book
- 软件设计书籍.pdf
- Java程序设计大学教程
- 功能性测试用例AAA
- 计算机网络管理员教程
- 专四词汇语法真题解析
- EJB3基础教程 pdf清晰版
- 容量测试:容量测试目的是通过测试预先分析出反映软件系统应用特征的某项指标的极限值(如最大并发用户数、数据库记录数等),系统在其极限值状态下没有出现任何软件故障或还能保持主要功能正常运行。容量测试还将确定测试对象在给定时间内能够持续处理的最大负载或工作量。容量测试的目的是使系统承受超额的数据容量来发现它是否能够正确处理。容量测试是面向数据的,并且它的目的是显示系统可以处理目标内确定的数据容量。
- PE-COEFF文件规范v8.0 简体中文版
- 计算机专业考研励志故事
- 系统分析员论文14篇
- oracle ppt课件
- Struts in action中文版
- ext帮助文档很好的js学习资料
- Hibernate PPT学习资料
