倍福PLC通过硬锁存优化第三方伺服电机高精度回零
需积分: 41 148 浏览量
更新于2024-09-07
8
收藏 530KB PDF 举报
在本文中,我们将深入探讨倍福PLC如何通过EtherCAT协议来精确控制第三方伺服电机,特别是关注在使用非倍福驱动器的情况下的解决方案。 EtherCAT是一种实时工业以太网技术,被倍福PLC广泛应用于伺服电机的高效通信和同步控制。
首先,介绍背景情况。在使用倍福的AX5000或EL72XX驱动时,可通过多种方式实现高精度回零,如软件同步(softwaresyn)、硬件同步(hardwaresyn)或硬件锁存(hardwarelatch),这些方法能够提供较高的定位精度。然而,当采用第三方EtherCAT驱动时,如台达ASD-A2-E伺服,通常依赖PLC的周期性操作(PlcCam)回零,这可能会影响精度。
针对第三方驱动器提高精度的方法有两个方向。一是利用伺服内部的自回零机制,如CANopenDS402的homing模式,通过参考点和Z脉冲实现精确回零,但需要调整控制模式,过程相对复杂。另一种方法是利用hardwaresyn或hardwarelatch功能,这无需模式切换,直接使用MC_Home命令,尤其适用于支持高速latch功能的伺服电机。
本文将以台达ASD-A2-E伺服为例,详细介绍如何在TwinCAT中配置驱动器以实现硬件锁存(Latch)回零。具体步骤包括:
1. **硬件准备**:确保使用的控制器(C5130-0130)、驱动器(ASD-A2-0221-E)和电机(ECMA-C10802RS)已正确连接,并通过扫描设备验证电机工作正常。
2. **软件配置**:在TwinCAT Manager的ConfigMode模式下执行设备扫描(ScanDevices),配置驱动器参数,如驱动器的Latch值(Touchprobepos1posvalue)和Latch状态PDO(60B9h和60BAh)。接着,激活配置并测试电机操作是否正常。
3. **设置Latch功能**:在ProcessData阶段,选择合适的PDO配置(例如0x1),将Latch功能设置为伺服回零所依赖的状态,确保在过零点时,利用伺服的高速锁存信号(latch signal)锁定编码器的位置,从而确定零点位置。
通过以上步骤,即使在使用第三方驱动的情况下,也能实现与倍福驱动类似的高精度回零功能,提升伺服系统的整体性能和精度。这个过程适用于任何支持高速latch功能的伺服电机,并且对于PLC编程人员和维护工程师来说,理解和实施这些配置技巧是非常重要的。
倍福产品应用技术
- 1 -
第三方 EtherCAT 驱动高精度回零——Hardware latch
问题背景:
对于 EtherCAT 伺服,若使用倍福驱动(AX5000 或 EL72XX)可以轻而易举实现各种高精度回
零,比如 software syn 或者 hardware syn,再或者 hardware latch。而对于第三方 EtherCAT 驱
动,在 TwinCAT 中通常采用 Plc Cam 的方式回零,这种方式由于受 PLC 周期影响精度相对较差。
那么,第三方驱动如何获得高精度的零点?方法有二:
其一,利用伺服内部自带回零的方式;例如 CANopen DS 402 的 homing 模式,可利用参考点
和 Z 脉冲回零,精度比 PLC Cam 方式更准确。这种方式需要对控制模式(6060H)进行切换,稍显
繁琐。其二,第三方伺服也可以考虑 hardware syn 或 hardware latch 的方式回零,无需模式切换,
直接使用 MC_Home 进行回零。本文主要针对第二种方法以台达 ASD-A2-E 伺服为例展开讨论,不
论是 COE 还是 SOE,只要伺服本身支持高速 latch 功能,均可使用本文描述方法实现高精度回零。
测试硬件:
控制器:C5130-0130 :1 套
驱动器:ASD-A2-0221-E :1 套
电 机:ECMA-C10802RS :1 套
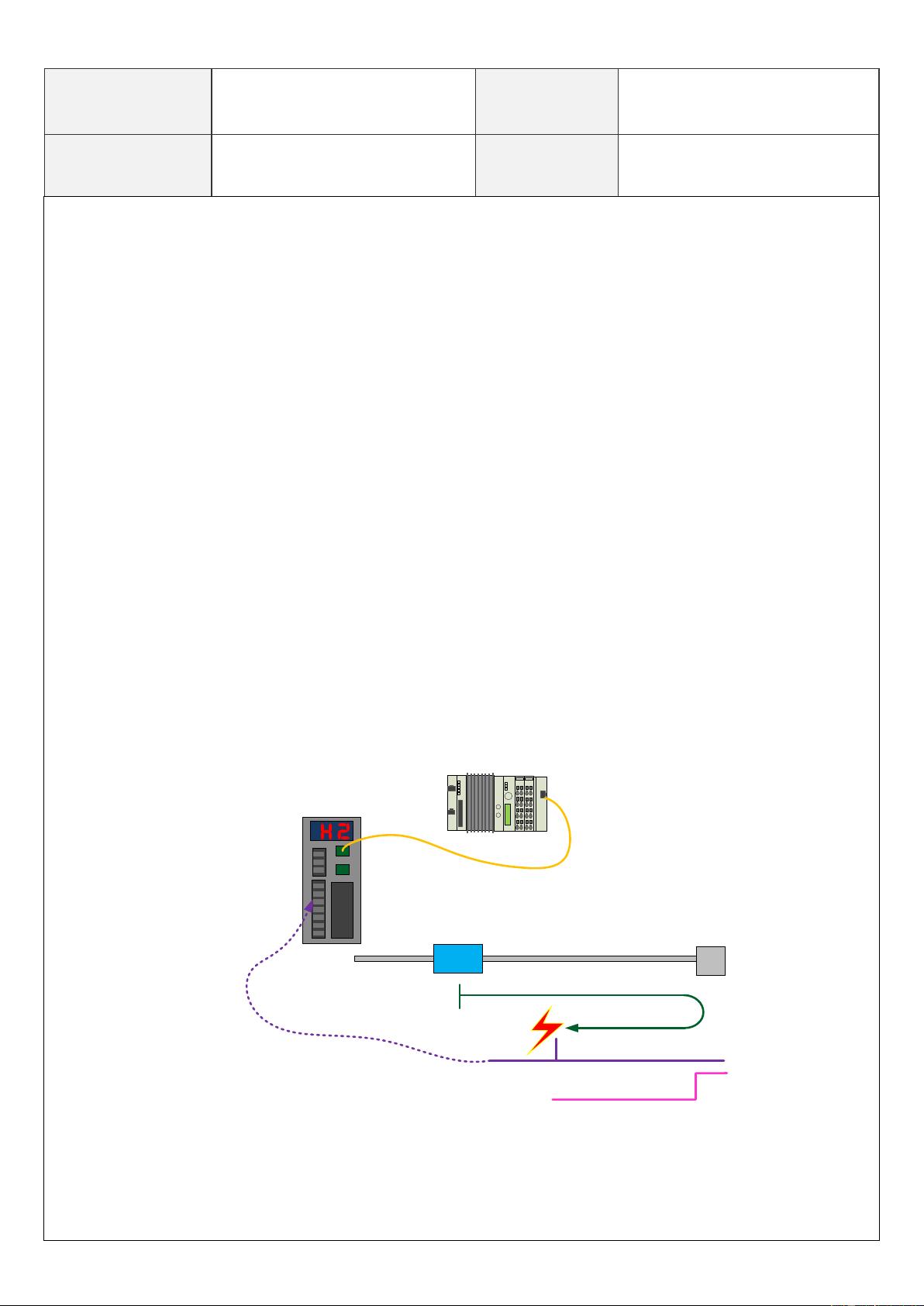
Motor
bCalibration
过零点时,利用伺服本地高
速锁存信号(latch signal)对
编码器位置进行锁存;
零点位置来源于伺服锁存位
置,而不是过零点时NC传
上来的编码器实际位置;
类别
Motion Control
日期
20
th
Dec. 2016
测试
h.kong@beckhoff.com.cn
q.liang@beckhoff.com.cn
部门
系统应用
下载后可阅读完整内容,剩余4页未读,立即下载
2018-12-20 上传
2020-11-09 上传
2018-01-30 上传
2023-06-06 上传
2021-04-30 上传
2022-07-12 上传

李风浪
- 粉丝: 4
- 资源: 12
 我的内容管理
展开
我的内容管理
展开







最新资源
- Fisher Iris Setosa数据的主成分分析及可视化- Matlab实现
- 深入理解JavaScript类与面向对象编程
- Argspect-0.0.1版本Python包发布与使用说明
- OpenNetAdmin v09.07.15 PHP项目源码下载
- 掌握Node.js: 构建高性能Web服务器与应用程序
- Matlab矢量绘图工具:polarG函数使用详解
- 实现Vue.js中PDF文件的签名显示功能
- 开源项目PSPSolver:资源约束调度问题求解器库
- 探索vwru系统:大众的虚拟现实招聘平台
- 深入理解cJSON:案例与源文件解析
- 多边形扩展算法在MATLAB中的应用与实现
- 用React类组件创建迷你待办事项列表指南
- Python库setuptools-58.5.3助力高效开发
- fmfiles工具:在MATLAB中查找丢失文件并列出错误
- 老枪二级域名系统PHP源码简易版发布
- 探索DOSGUI开源库:C/C++图形界面开发新篇章
