

9
2. PROGRAMME OF REQUIREMENTS
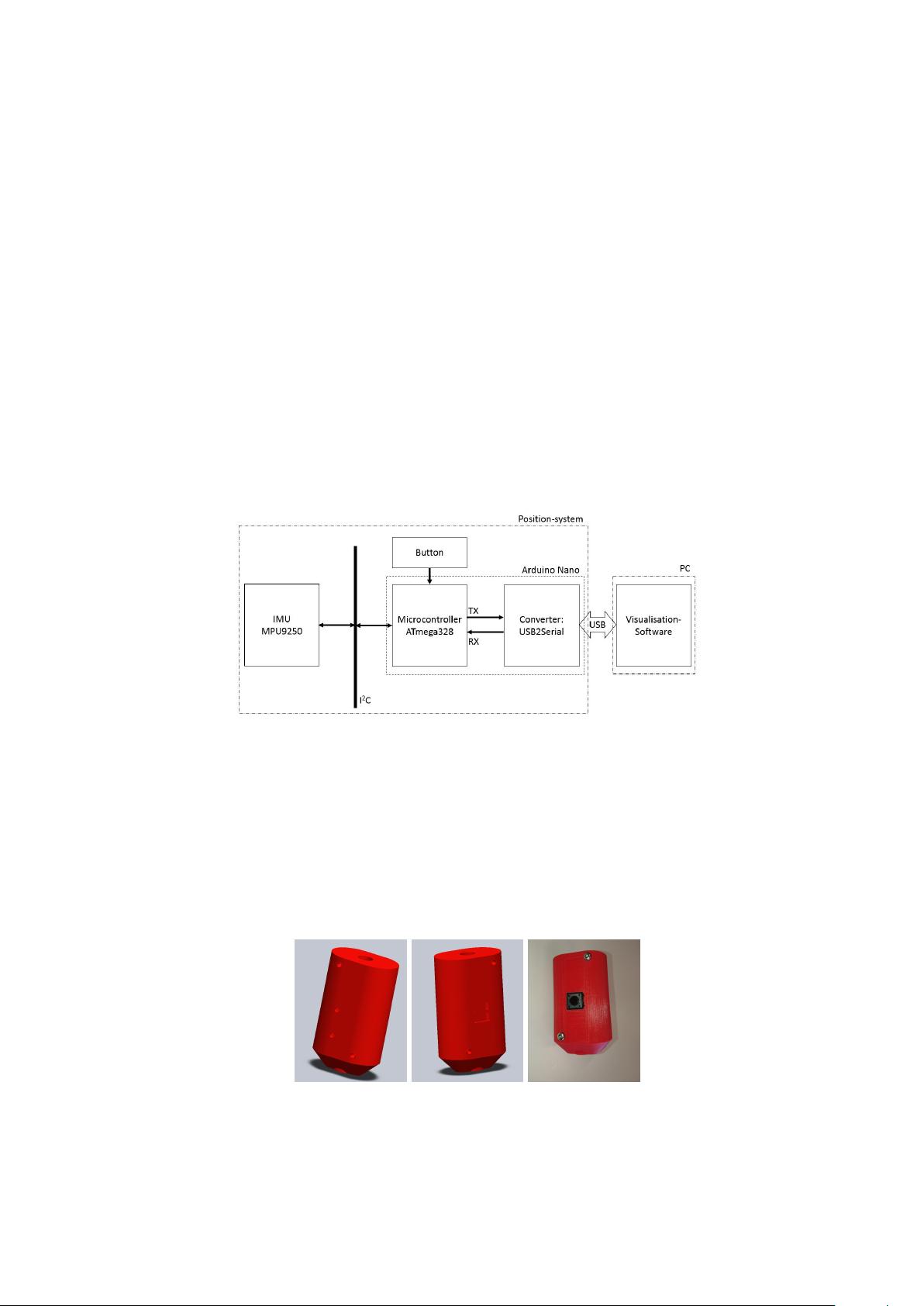
The position-system will track the movements and orientation of the probe and return an accurate
position and orientation to the visualisation-software.
A. Functional requirements
[1,1] The position-system must give the position of the probe to the visualisation system.
[1,2] The position-system must give an orientation of the probe to the visualisation system.
[1,3] The position-system must work during a measurement performed by a doctor in a hospital or
practice.
B. Environmental compatibility
[2,1] The position-system must not influence the surrounding equipment.
[2,2] The position-system must not have any negative side effects on the user and on the patient.
C. System requirements
1) Utilisation features:
[3,1,1] The position-system must give a position in x,y,z in cm to the visualisation-software.
[3,1,2] The position-system must give the position with an accuracy of 1 cm.
[3,1,3] The position-system must give the orientation in a normal vector to the visualisation-software.
[3,1,4] The position-system must give the orientation with an accuracy of 2 degrees.
[3,1,5] The position-system must be insensitive to the rotation of the probe.
[3,1,6] The position-system must not influence the permittivity measurement.
[3,1,7] The position-system must be user-friendly.
[3,1,8] The position and orientation tracking must start/stopped when a button is pressed.
2) Production and putting into use features:
[3,2,1] The position-system must be attached to the probe, but must not limit the movability of the
probe.
[3,2,2] Matlab must be pre-installed on the user’s premise and must have the needed license.
[3,2,3] The handle must be printable by 3D-printer and made to be assembled by hand.
[3,2,4] The position determination device, including a button, must fit in the handle.
[3,2,5] The operational software must be installed on the microcontroller ATmega328.
[3,2,6] The wiring of the device must be done before delivery.
[3,2,7] The system may not stop sending data within 12 hours of active use.
3) Discarding features:
[3,3,1] It must be possible to dismantle the device by hand.
[3,3,2] The microprocessor must be reprogrammable and reusable.
D. Testing Requirements
[4,1] All subsystems must be able to communicate with each other.
[4,2] All filters will not filter out data that is needed for the accuracy described in requirements [3,1,2]
and [3,1,4].
[4,3] All filters will filter out distortions that would otherwise cause inaccuracy greater than described
in requirements [3,1,2] and [3,1,4].
[4,4] All offsets needs to be completely removed, the mean after removal must be zero.
E. Development of manufacturing methodologies
[5,1] The position-system must run on a microcontroller ATmega328. The ATmega328 must pass the
position of the probe to the visualisation-software, which is written in Matlab.
[5,2] The operational software must be developed in standard ANSI C. The employed compiler must
be validated according to the ANSI/ISO/IEC standards.
F. Business strategies, marketing and sales opportunities
[6,1] The product must be delivered and installed within 3 months when ordered.
剩余48页未读,继续阅读


tianfei23
- 粉丝: 1
- 资源: 7
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++标准程序库:权威指南
- Java解惑:奇数判断误区与改进方法
- C++编程必读:20种设计模式详解与实战
- LM3S8962微控制器数据手册
- 51单片机C语言实战教程:从入门到精通
- Spring3.0权威指南:JavaEE6实战
- Win32多线程程序设计详解
- Lucene2.9.1开发全攻略:从环境配置到索引创建
- 内存虚拟硬盘技术:提升电脑速度的秘密武器
- Java操作数据库:保存与显示图片到数据库及页面
- ISO14001:2004环境管理体系要求详解
- ShopExV4.8二次开发详解
- 企业形象与产品推广一站式网站建设技术方案揭秘
- Shopex二次开发:触发器与控制器重定向技术详解
- FPGA开发实战指南:创新设计与进阶技巧
- ShopExV4.8二次开发入门:解决升级问题与功能扩展
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


