MATLAB驱动的钢板磁悬浮系统研究:控制策略与仿真分析
版权申诉
135 浏览量
更新于2024-06-19
收藏 1.18MB PDF 举报
本篇论文深入探讨了基于MATLAB的钢板磁悬浮控制系统的研究。作者首先构建了单块钢板、垂直带钢和水平带钢三种不同的磁悬浮系统模型,这些系统是实际应用中常见的结构,涉及到了电磁力的精确计算和非线性运动方程的建模。通过MATLAB这个强大的工具,论文展示了磁悬浮系统的非线性和不稳定特性,这是磁悬浮技术的关键挑战之一。
在论文的核心部分,作者针对垂直带钢磁悬浮系统,重点研究了线性化后的电流控制和电压控制对象。电流控制对象采用了一种特别针对不稳定对象的PID控制器设计策略,旨在优化控制性能。而电压控制则利用极点配置法设计PID控制器,两者都得到了令人满意的控制效果。
混合灵敏度设计方法在此被引入,用于电流控制对象的无限增益(∞H)控制器设计。这种设计方法强调了控制器的鲁棒性,即即使面对系统参数变化或质量扰动,也能保持稳定的控制性能。仿真结果验证了∞H控制器的有效性,显示出良好的适应性和抗干扰能力。
随后,论文也探讨了电压控制对象上的∞H控制器设计,同样取得了良好的控制效果,表明这种控制器不仅适用于电流控制,也能有效应对电压控制任务。因此,论文不仅提供了磁悬浮系统的基本模型建立和控制策略,还展示了MATLAB在复杂系统分析和控制设计中的实用价值。
关键词:钢板、磁悬浮、MATLAB、PID控制、无限增益控制(∞H控制)、混合灵敏度设计,共同构成了这篇论文的核心研究内容,为磁悬浮技术在工业生产中的实际应用提供了理论支持和技术指导。

基于 MATLAB 的钢板磁悬浮控制系统研究
– 8 –
2) 磁路中没有漏磁现象;
3) 电磁铁的导磁率无限大;
4) 磁极处的涡流忽略不计;
5) 操作点附近的线圈电感为恒定值,由于磁浮对象的运动引起的电动势忽略不
计。
1.2.2
论文内容安排
1. 在第一章绪论中对磁悬浮技术进行综述,介绍了磁悬浮的原理及其特点,它
的发展及当前应用。阐述了论文工作的背景出发点,对论文内容进行安排。
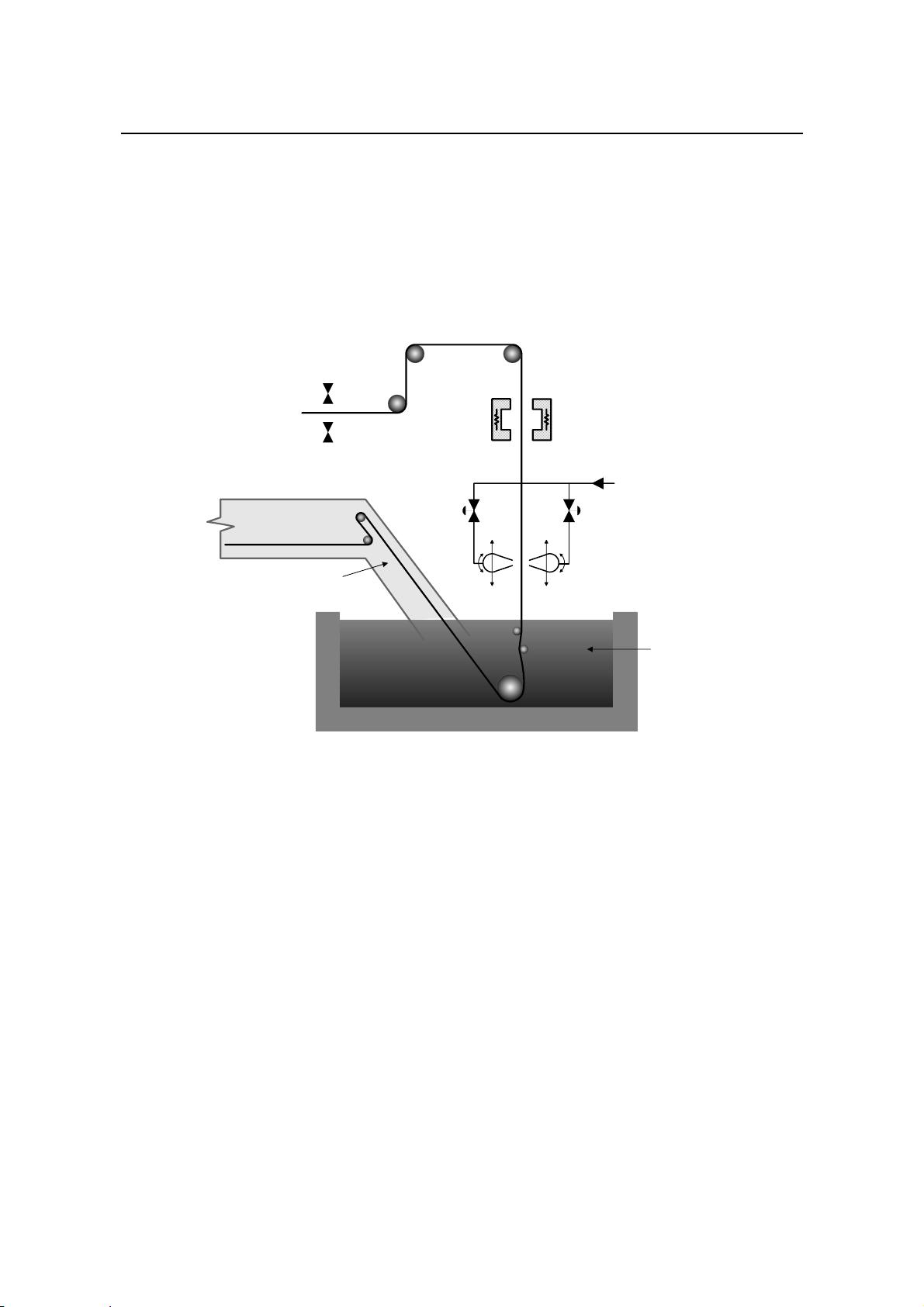
2. 第二章涉及钢板磁悬浮系统数学模型建立及仿真研究。首先阐述了单块钢
板、垂直带钢、水平带钢这三种钢板磁悬浮系统的由来。然后基于对电磁力模型和
非线性运动方程的分析,建立起三种钢板磁悬浮系统的非线性系统模型,并设计出
一个兼顾三种系统共性与异性的综合性系统框图,方便了后续仿真研究。基于
MATLAB 对非线性系统所做的仿真研究,显示出钢板磁悬浮系统具有典型的非线性
和不稳定性。其后在系统的线性化处理中,以垂直带钢磁悬浮系统为代表,建立了
线性化的系统电流控制及电压控制对象模型,为后续章节中利用线性系统理论对系
统进行控制器设计打下基础。
3. 第三章中讨论了如何用 PID 控制方法来实现对前一章中建立的钢板磁悬浮
系统的电流控制及电压控制对象模型的稳定控制。首先介绍了 PID 控制器的相关背
景知识;然后针对电流控制对象模型,采用了一种针对不稳定对象的 PID 控制器设
计方法,对控制结果进行了分析;对于电压控制对象模型,采用极点配置的方法设
计 PID 控制器,取得了较为满意的控制效果。
4. 第四章中首先对
∞
H 控制理论的相关背景知识予以介绍,然后重点阐述了混
合灵敏度设计方法,包括闭环系统的设计要求,加权函数的选择方法以及如何基于
Matlab 的鲁棒控制工具箱进行混合灵敏度设计等,在此基础上,对电流控制对象进
行
∞
H 控制器设计,得到满意的控制效果后,进一步通过仿真讨论了加权函数的选择
以及控制对象的质量摄动对控制效果造成的影响,从仿真结果上看,
∞
H 控制器实现
了较好的鲁棒性。最后对电压控制对象同样进行
∞
H 控制器设计,得到的仿真结果显
示了
∞
H 控制器对于电压控制对象同样具有较好的控制效果。
5. 第五章中对论文工作进行总结,并提出展望。


剩余71页未读,继续阅读
2022-04-26 上传
926 浏览量
1039 浏览量
2036 浏览量
点击了解资源详情
点击了解资源详情
点击了解资源详情


xox_761617
- 粉丝: 29
- 资源: 7802
 我的内容管理
展开
我的内容管理
展开







最新资源
- PureMVC AS3在Flash中的实践与演示:HelloFlash案例分析
- 掌握Makefile多目标编译与清理操作
- STM32-407芯片定时器控制与系统时钟管理
- 用Appwrite和React开发待办事项应用教程
- 利用深度强化学习开发股票交易代理策略
- 7小时快速入门HTML/CSS及JavaScript基础教程
- CentOS 7上通过Yum安装Percona Server 8.0.21教程
- C语言编程:锻炼计划设计与实现
- Python框架基准线创建与性能测试工具
- 6小时掌握JavaScript基础:深入解析与实例教程
- 专业技能工厂,培养数据科学家的摇篮
- 如何使用pg-dump创建PostgreSQL数据库备份
- 基于信任的移动人群感知招聘机制研究
- 掌握Hadoop:Linux下分布式数据平台的应用教程
- Vue购物中心开发与部署全流程指南
- 在Ubuntu环境下使用NDK-14编译libpng-1.6.40-android静态及动态库
