电动机速度PID控制的变量与离散化设计
74 浏览量
更新于2024-09-01
收藏 534KB PDF 举报
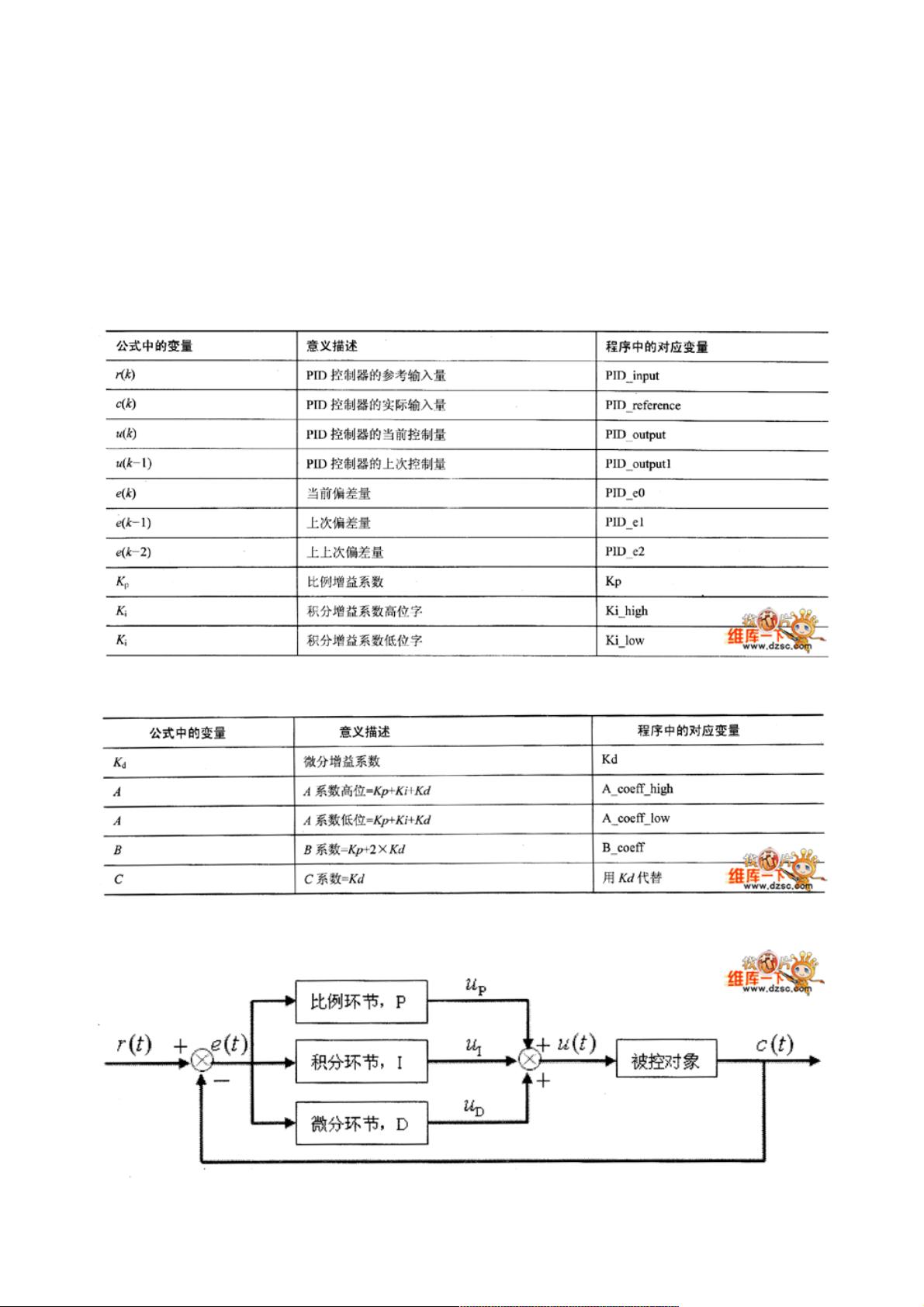
在本文中,我们将深入探讨常用自动系统控制系统软件设计中的关键环节,特别是针对数字PID控制器和模糊PI控制器的设计思路。首先,为了简化编程和理解,程序设计时会明确定义一系列变量,如表1所示,这些变量包括电机速度设定值r(t),实际测量值c(t),偏差信号e(t),以及控制器输出的控制量u(t)或ΔU(k)。PID控制器的核心是比例(P)、积分(I)和微分(D)三种控制策略。
PID控制器的原理框图如图1所示,其基本结构围绕这三个参数展开:比例系数Kp负责快速纠正误差,积分项Ti通过积累历史误差来消除静态偏差,而微分项Td则帮助预测未来误差,减少动态过程中的超调。在数字PID控制器设计中,会将连续的模拟PID公式离散化,用采样周期Ts将连续信号转换为离散形式,以适应LF2407等数字控制器的处理能力。
对于PID控制算法,它允许比例、积分和微分作用的独立使用或组合应用,以平衡系统的快速响应与稳态性能。位置式PID(式4-2)与增量式PID的区别在于,前者直接输出控制量,后者只输出控制量的增量,以提高系统的稳定性和鲁棒性。在实际编程中,程序员需要根据系统的具体需求,调整这些参数,以实现最佳的控制效果。
设计数字PID控制器的过程涉及了数学模型的建立、变量定义、控制策略的选择与调整,以及离散化处理,这些都是实现自动化控制系统软件的关键步骤。在整个设计过程中,理解和掌握PID控制原理、变量的意义以及如何调整参数,对于保证系统的精确控制和性能至关重要。
常用自动系统控制系统软件系统设计思路常用自动系统控制系统软件系统设计思路
在数字PID控制器和模糊PI控制器的程序设计中需要用到大量的变量,为了便于以后的讲解,首先定义一些程序
中所要使用的变量名和公式中使用的变量名,如表1所示。 表1 公式中变量和程序中变量的对应关系及
意义表 续表 本首先设计一个数字PID控制器,现在假设它是一个对电动机速度进行PID控制的系统。图1是
PID控制器的原理框图。 图1 PID控制器的原理框图 图1中,r(t)是电机速度设定值,c(t)是电机转速的
实际测量值,e(t)是输入控制器的偏差信号,勿⑺是控制器输出的控制量,则PID控制算式如式4-1所示。
在式4-1中,Kp是比例系
在数字PID控制器和模糊PI控制器的程序设计中需要用到大量的变量,为了便于以后的讲解,首先定义一些程序中所要使
用的变量名和公式中使用的变量名,如表1所示。
表1 公式中变量和程序中变量的对应关系及意义表
续表
本首先设计一个数字PID控制器,现在假设它是一个对电动机速度进行PID控制的系统。图1是PID控制器的原理框图。
图1 PID控制器的原理框图
图1中,r(t)是电机速度设定值,c(t)是电机转速的实际测量值,e(t)是输入控制器的偏差信号,勿⑺是控制器输出的控制
下载后可阅读完整内容,剩余7页未读,立即下载
2020-11-13 上传
2016-01-16 上传
2021-08-08 上传
2023-05-16 上传
2024-10-25 上传
2024-10-25 上传
2023-06-07 上传
2024-10-25 上传
2023-05-05 上传

weixin_38722607
- 粉丝: 5
- 资源: 863
 我的内容管理
展开
我的内容管理
展开







最新资源
- Aspose资源包:转PDF无水印学习工具
- Go语言控制台输入输出操作教程
- 红外遥控报警器原理及应用详解下载
- 控制卷筒纸侧面位置的先进装置技术解析
- 易语言加解密例程源码详解与实践
- SpringMVC客户管理系统:Hibernate与Bootstrap集成实践
- 深入理解JavaScript Set与WeakSet的使用
- 深入解析接收存储及发送装置的广播技术方法
- zyString模块1.0源码公开-易语言编程利器
- Android记分板UI设计:SimpleScoreboard的简洁与高效
- 量子网格列设置存储组件:开源解决方案
- 全面技术源码合集:CcVita Php Check v1.1
- 中军创易语言抢购软件:付款功能解析
- Python手动实现图像滤波教程
- MATLAB源代码实现基于DFT的量子传输分析
- 开源程序Hukoch.exe:简化食谱管理与导入功能
