ARM920T嵌入式系统CAN总线与RS-485驱动开发
49 浏览量
更新于2024-08-31
收藏 1.08MB PDF 举报
"基于ARM 920T嵌入式通信控制系统设备驱动开发"
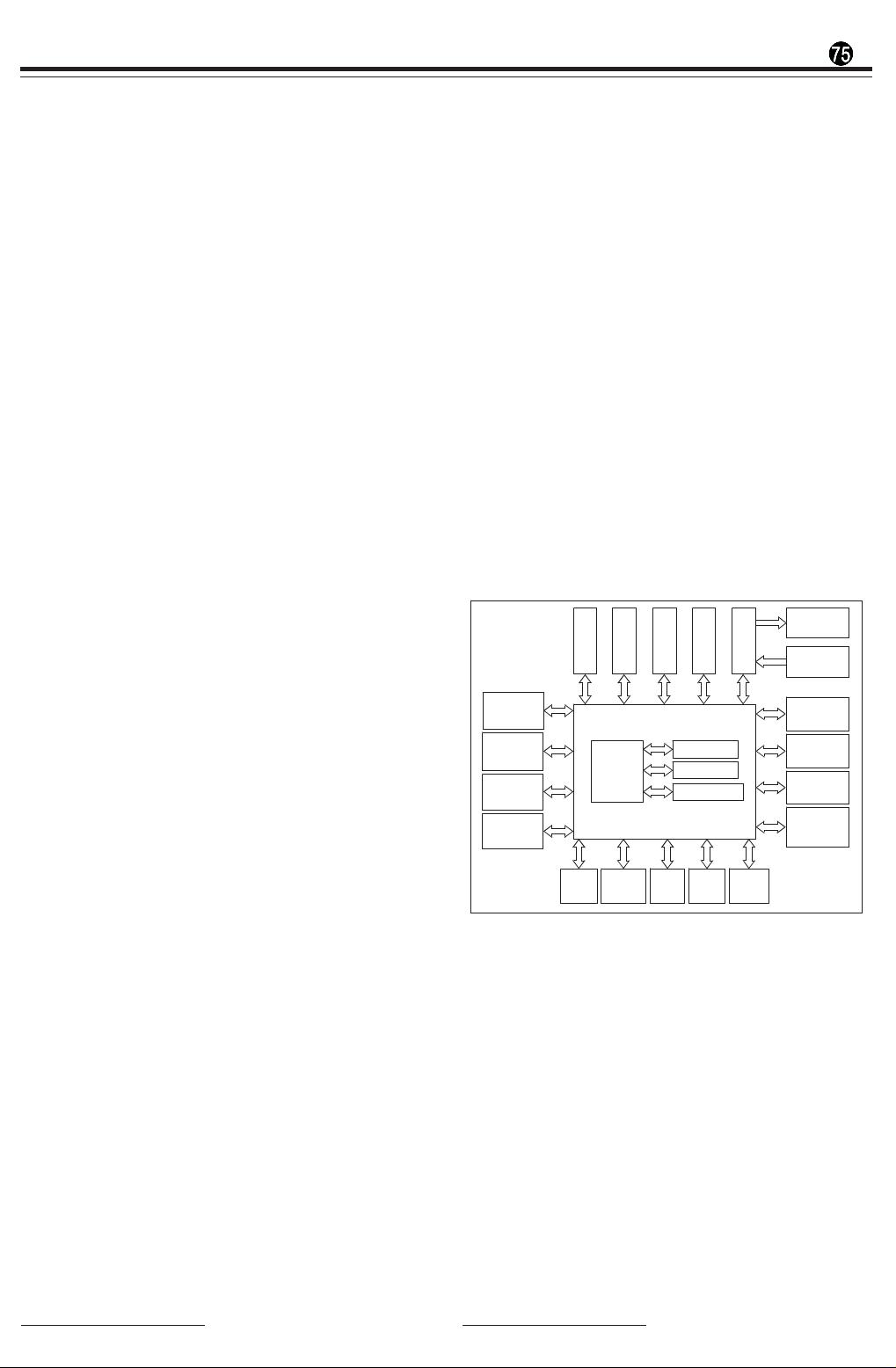
本文主要探讨了一种基于ARM 920T处理器和Linux操作系统的嵌入式通信控制系统,该系统设计旨在解决传统8/16位微控制器在速度、功耗和网络协议支持上的局限性,以满足现代工业环境中大量信息管理的需求。文章详细阐述了系统架构,并讨论了其在工业系统中的实际应用。
在硬件层面,ARM920T是一款高性能、低功耗的微处理器,广泛应用于嵌入式系统中。它为开发高效能、高可靠性的通信控制提供了强大支持。Linux操作系统则因其开源、稳定和强大的网络功能,成为了该系统的理想选择。
在软件开发方面,文章主要关注了驱动程序的开发。在嵌入式系统中,设备驱动是连接硬件与操作系统的关键,对于CAN(Controller Area Network)总线和RS-422/RS-485总线的驱动程序开发,作者提到了两种方法:动态模块加载法和静态编译进内核法。动态模块加载允许在运行时加载或卸载驱动,提供了灵活性;而静态编译进内核法则将驱动程序直接集成到内核,提供更高的效率但缺乏动态性。作者分析了这两种方法的优缺点,并分享了驱动程序的调试技巧。
通过使用动态模块加载法,开发者可以在不重新编译整个内核的情况下更新或修改驱动,这对于开发和维护过程非常方便。而静态编译进内核的方法则使得驱动与内核紧密结合,通常用于性能要求严格的场合。在实际应用中,开发者可以根据具体需求选择合适的驱动开发策略。
文章还详细描述了CAN总线和RS-422/RS-485总线驱动的开发流程,这些总线在工业自动化和远程通信中扮演着重要角色。通过这些驱动,嵌入式系统能够有效地控制和通信,实现数据传输和设备控制。
这篇文章深入浅出地介绍了基于ARM 920T的嵌入式系统设计,特别是其在设备驱动开发方面的实践,为读者提供了丰富的理论知识和技术指导,有助于理解如何构建高效、可靠的嵌入式通信控制系统。
!
!"
#$%&’()*+,-./0123456
789:
!
;<,/=45789>6?$ @A
"
< B CD23EF G H 6I)/ =
!
J3K
" ! #$
LMNOPQ+RST
#
UVWXYZ
%&’()&(’
[\
]^_‘
"
abcdce.fghRijKkl 2
3 m W n o p q & 6 r )
!
s t
*+,
$
*-./&0(-
+%12 ,/034&(5
%
k l u v w 6 e x y z 1 { | }
64&78
~36ex
"
i+
*+,
64&78
6{|}~3*+kl~3?o%&)
!
/=C<~3KI)y^
"
<
#
K
!
+
*+,
vw
9: ;<#=
{| }
?oNO~3
"
*C¡¢£¤ ¥ ¦
§¨©ª¤i~3«¬/NOP®¯°
$
2*>
%
±²³
+1 ? @AA ! +1 ?@"=
±²C´µK¶´
!
#
~3·¸¹1kº»&
¼/½K{|}?oNO~3¾
<A
¿
*+,
v
w
9: ;<#=
ÀªÁ
"
ÂÃ{|}
64&78
ĺ23
"
F
YÅWÆnopÇÈɽÊ
#
?oq& ³klNO
ËU.
!
9: ;<#=
<
24))75 6BC40
ÌÍi K+
*+,
;AD E
Î&P ÏKkluv w
"
Ð Ñ
<A
¿
*+,
Ò
ÓÈ
F$
¿
E37GH
ÒÓÈ
"
=
u7ÔÕ²
"
Ö
FIF ,%:1 ! ,JK
K× Ø Ù¹
"
©Ú%& Û Ü
$
,,L
%
ÐÑ
M4&-BN 29
#
64&78
Ë{|}ĺ~3
!
(ÝÞ
hFß
AO! ,JK
"
à
,/.()40P 2)7&03
[Î & P
"
F*+áâÂÊ
#
Q1:
Âʳã·Î&
"
©äåæ¢
Rç
"
åæèé³Î&]^êë
!
vw© È y
ìí
"# R A<A
#
?*ìñ²
$
L1S
% #
îí
#
«ïð
³ñÝËNOP
"
Ðòóô õö
#
÷ø ù³ úûð
"
U.]^üW
!
!
ý~3¸¹þå
#
¼é
!
Àý ?o %&U.
"
ÿ~3« ¬
@
!"
#$%
+1 ? @"= ! @AA
ìí
#
A
!&"’%
2*> T AIO
±²
#
#
!( ) P$%
#O ! #OO ,H4’ ! 5
¾* î ³
<A
!+n,|
!
,-U.
"
.XàY//0
"
F¾
123ò
!
À4¢ý F5 6
"
~3/½ 789³
2:;<2!
"
.XÇ=2>?@ùA
$
9,%
%
/½
"
B~3CDüKEFG.H
!
I { |} ? o N O ~ 3 àä JK ì Ã L i
$
L*+E
% #
L1S#I#
#
2*> AIOS
³¾*îË kl±²M
Ní
"
FºÀî+
"
?OPÛKZQ±²RýS
" !
#$
LMÎ& P
$
,2L
%
y K{|}k l N O /
"
TL’K78³oUV
+1 ? @AA ! +1 ? @"=
±
²¨|{|}NOP
"
bO[\W:X?O
%&’()&(’
iYZ[\(’]
!
2*>
^âFLÈ_n,|
#
‘
ø
ù
ó
ô
õ
ö
Y
/
/
0
ú
û
ð
a
ñ
C bcd
eaP
«¬
@
!
+1 ? @AA
«¬
@
!
+1 ? @"=
«¬
A
!
2*>
«¬
#
!
îfí
«¬
<A
!+n
% ! U
¬
j±²
g«¬
jí
«¬Y
//0
,2L
9: ;<#=
1Q+*,
>/&- VW/53
>B) VW/53
ªÁh
ih
îf
í
« ï
ð
<
!
L1S
<
!ì
í
A<A
«ï
2V
ç
!
F
"#$ %!
V4CIF 1X5’(G /)034’(0’7)(
! "
*+, ;A! E
# $ % & ’ ( )
* + , - . / 0 1
!"#
!
$%&
"
’()*+, -./,0
!
1(
F!!"Y$
#
&’
!
234
" ! F$
56789:;<=>
$
?@ABCD
%&’()&(’
EFGH
!
IJKLMNAOP
QRS4TU
%
VWXYZ;
*+, ;A! E
[
64&78
4\]^_P78‘3
!
abc‘3de[fg
h‘34ij
%
klcj .m nopqr[smtuv wx ryz‘3{|}~789
&
2*>
#
+1 ? @AA ! +1 ? @"=
.4
!
c.4r
’
yz\]^‘
3.4
A
Yrc
%
()*
!
\]^‘3
’
*+,
’
64&78
’
.
+!,-.
!
E: <FFI=A
’
E: <$
/0123
!
S
/45.
!
$%&’ ( ’&)*
"
+%%$
#
!$ ( %!Y= ( %@
6789
!
+%%= ( FF ( <!
’
:;89
!
+%%$ ( !A ( AY
! " # $ % & ’
,-./012/ 345.1 670489024: ,;72<8.:0
=4->+$ ?4>$
Z7&I+%%$
<
+$
=<
$
9
+%%$
>
$
?
! 9: ;<F= L5() ,/&7/WI 3’’[\!NNNI04))75I0BGI
下载后可阅读完整内容,剩余3页未读,立即下载
2020-08-09 上传
点击了解资源详情
2019-09-05 上传
2020-11-08 上传
2020-10-19 上传
2021-09-21 上传
2013-06-24 上传
2020-04-26 上传
点击了解资源详情

weixin_38550722
- 粉丝: 8
- 资源: 928
 我的内容管理
展开
我的内容管理
展开







最新资源
- Fisher Iris Setosa数据的主成分分析及可视化- Matlab实现
- 深入理解JavaScript类与面向对象编程
- Argspect-0.0.1版本Python包发布与使用说明
- OpenNetAdmin v09.07.15 PHP项目源码下载
- 掌握Node.js: 构建高性能Web服务器与应用程序
- Matlab矢量绘图工具:polarG函数使用详解
- 实现Vue.js中PDF文件的签名显示功能
- 开源项目PSPSolver:资源约束调度问题求解器库
- 探索vwru系统:大众的虚拟现实招聘平台
- 深入理解cJSON:案例与源文件解析
- 多边形扩展算法在MATLAB中的应用与实现
- 用React类组件创建迷你待办事项列表指南
- Python库setuptools-58.5.3助力高效开发
- fmfiles工具:在MATLAB中查找丢失文件并列出错误
- 老枪二级域名系统PHP源码简易版发布
- 探索DOSGUI开源库:C/C++图形界面开发新篇章
