野火平衡组调试指南:初学者的直立控制入门
需积分: 9 146 浏览量
更新于2024-07-23
收藏 1.32MB PDF 举报
"野火平衡组站立调试指南(初级篇)" 是一篇面向初学者的教程,旨在帮助新手通过ENC-03陀螺仪和模块硬件进行平衡组的调试,实现物体的直立。教程强调这并非适用于智能车比赛,而是作为学习和入门的实践项目。
在调试过程中,主要涉及以下几个关键知识点:
1. **PD控制算法**:PD算法是一种常见的闭环控制系统,由比例(P)和微分(D)两部分组成。在这个应用中,PD算法用于根据陀螺仪采集的角速度数据实时调整模块的姿态,以保持直立状态。比例项用来减少误差,而微分项则有助于减小系统的震荡。
2. **模块引脚与信号连接**:教程提到了ENC03陀螺仪的角速度、角度和Z轴信号。在实际操作中,需要正确连接这些引脚到单片机,以便读取和处理数据。
3. **调试环境的建立**:调试过程中,需要将单片机采集的参数通过串口通信传递到上位机,以便观察和分析数据。这可以通过无线蓝牙或USB转串口线实现。蓝牙通信需注意RXD和TXD的对应连接,而USB转TTL则可以直接将单片机数据发送给上位机。
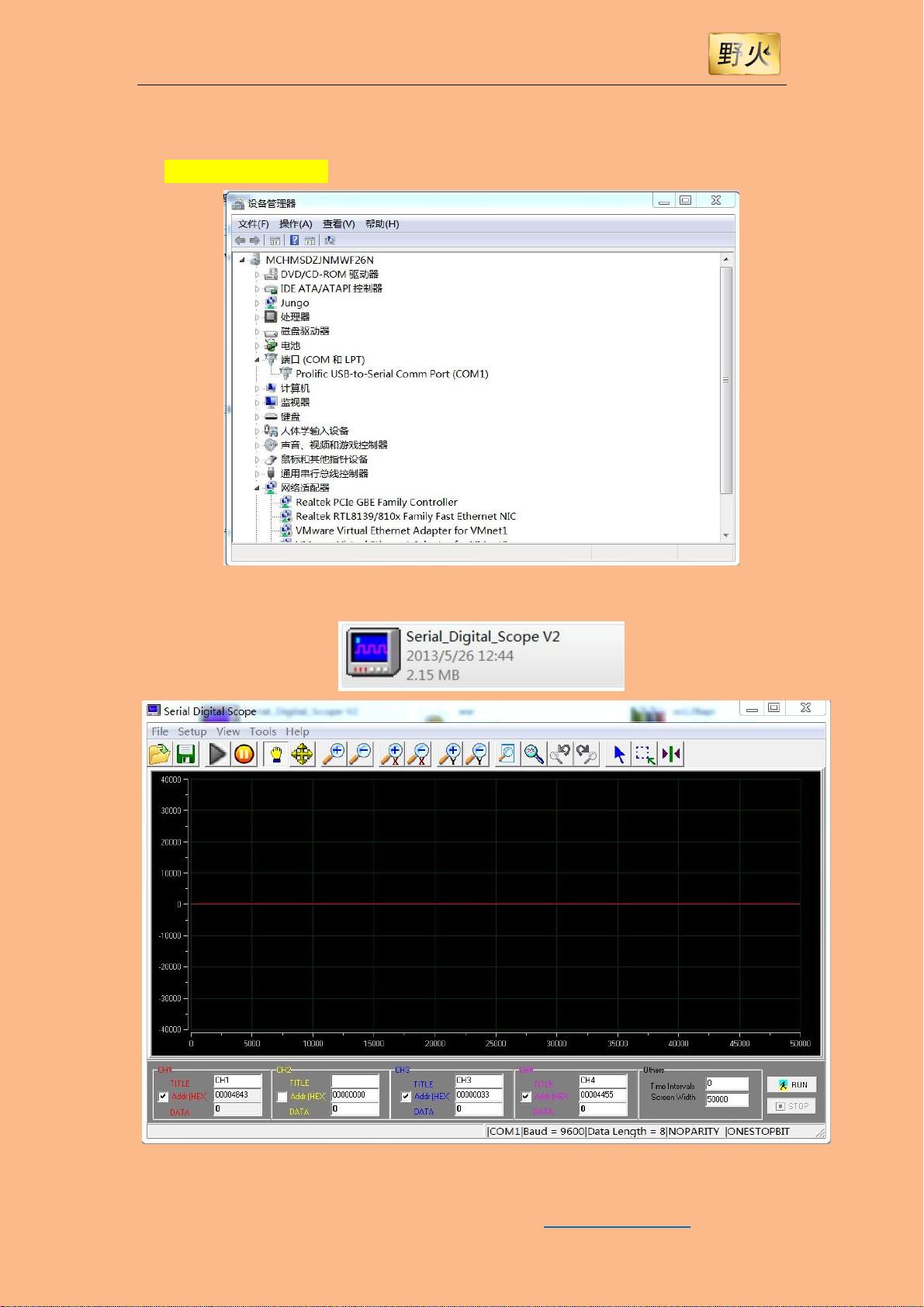
4. **上位机工具**:使用名为Serial_Digital_ScopeV2的上位机软件,它是一个串口通信工具,可以显示和接收来自单片机的数据,便于观察系统动态和参数调整。
5. **扩展传感器**:为了获取更全面的信息,可能需要添加如MMA7361这样的三轴加速度模块,以检测X、Y、Z轴的加速度,进一步增强平衡控制。
6. **USB转UART/RS232**:对于串口通信,除了蓝牙,还可以使用USB转TTL或USB转RS232模块。RS232信号需要通过MAX3232芯片转换为单片机能识别的TTL电平。
7. **注意事项**:蓝牙模块的接线要正确,确保RXD与TXD之间的对应关系。在使用USB转串行口时,需要安装相应的驱动,并在设备管理器中找到对应的端口。
这篇指南提供了一个逐步学习和实践平衡组调试的框架,通过理解并应用PD控制、传感器数据处理和串口通信技术,初学者可以掌握基础的平衡控制原理。
更多资料,请访问野火初学 123 论坛:www.chuxue123.com
如果不是 COM1,点击串口驱动,右键-属性-端口设置-高级-COM 端口号修改为 COM1.
这个软件只兼容 COM1.
接着 轮到 Serial_Digital_Scope V2 上场:
剩余15页未读,继续阅读
2014-04-20 上传
2015-03-23 上传
点击了解资源详情
2014-12-25 上传
257 浏览量
2015-03-21 上传
2024-01-24 上传









