手眼标定算法详解:从理论到实践
需积分: 30 34 浏览量
更新于2024-09-07
1
收藏 162KB DOCX 举报
"本文主要介绍了机械手标定算法的推导过程,重点在于理解相机坐标系与机械手坐标系之间的转换矩阵T的计算方法。通过分析不同坐标系下的点P在运动过程中的坐标变换,推导出求解转换矩阵T的公式,并提供了两种不同的求解策略。"
机械手标定算法的核心目标是确定相机坐标系Cc与机械手坐标系Ce之间的转换矩阵T,该矩阵由旋转矩阵R和平移向量t组成。在手眼系统中,通常采用eye-in-hand配置,即相机安装在机械手上,因此需要解决的是相机相对于机械手的定位问题。
首先,通过相机标定可以获得相机坐标系Cc与世界坐标系Cw间的旋转矩阵和平移向量。当机械手从位置1移动到位置2时,可以得到相应坐标系之间的转换矩阵。通过标定板获取内外参数,利用这些参数可以计算出相机在不同位置时的坐标转换矩阵A和B,进一步得到Cc1与Cc2间的转换矩阵C。
然后,结合机械手在不同位置的坐标系转换矩阵D(直接读取),可以推导出Cc1与Ce1及Cc2与Ce2间的转换矩阵X。通过空间点P在不同坐标系下的坐标关系,可以建立矩阵关系CX=XD,从而求解出T。
求解T的方法有两种。第一种方法是至少需要两组Cc和Ce的坐标转换矩阵,即至少3个位置的相机标定结果,通过求解线性方程组来获得唯一解。第二种方法是控制机械手做两次运动,得到四个关系式,通过对R和t的求解,找到唯一解。
在实际标定过程中,一般会控制机械手从一个已知位置A移动到另一个位置B,然后记录下这两个位置时的相机坐标系和机械手坐标系的变换。通过对比这些变换,可以建立数学模型并求解出T。如果运动涉及到旋转和平移,那么t可以通过线性方程组解出,而R则可以通过旋转轴和旋转角度的特定关系来确定。
机械手标定算法的推导涉及坐标系转换、点的坐标变换以及矩阵运算,其目的是精确地建立相机与机械手之间的坐标关系,为后续的机器人视觉定位和操作提供基础。这个过程既包括理论推导,也包含实践中的数据采集和处理,对于理解和实现自动化系统的视觉引导至关重要。
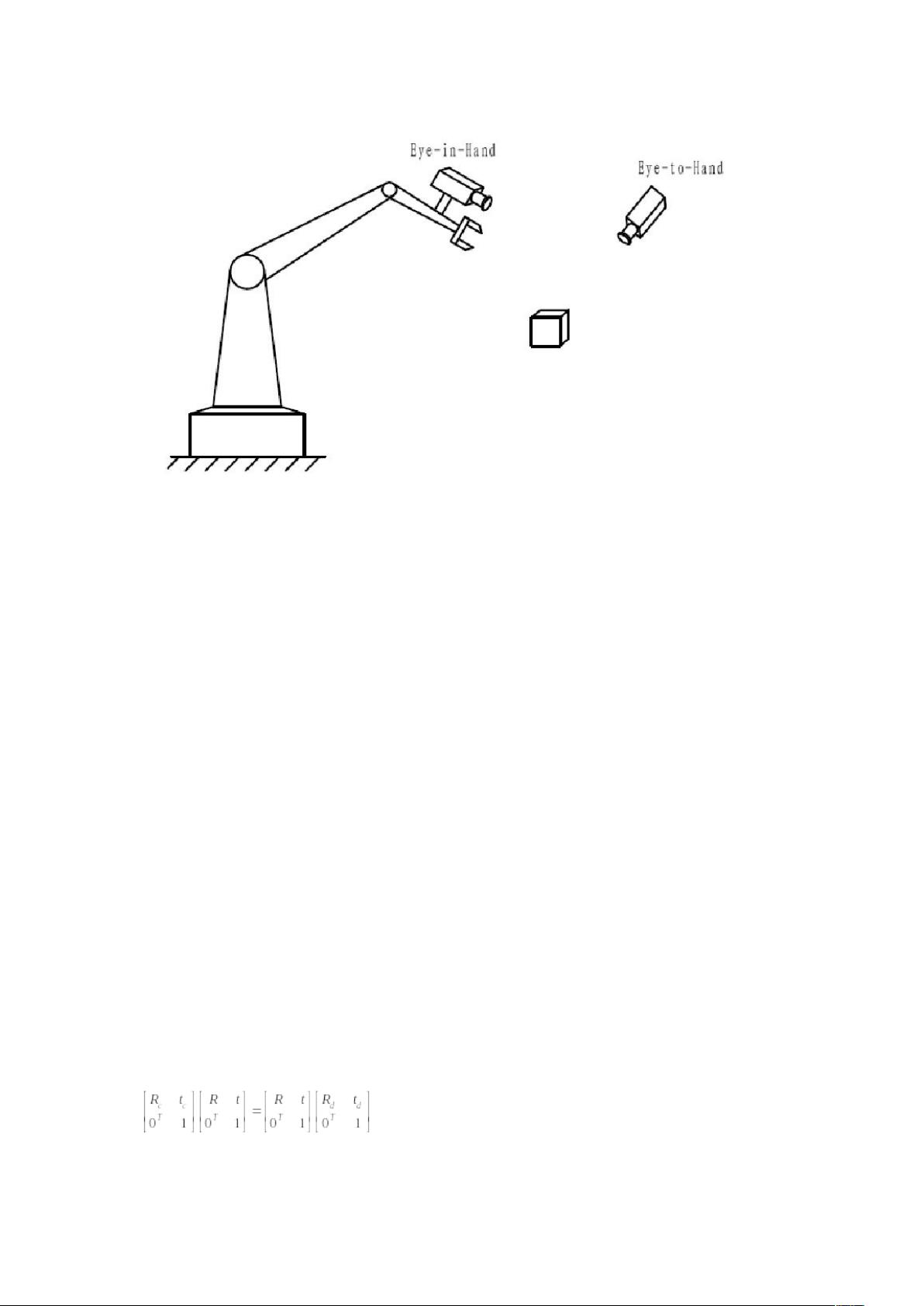
手眼系统示意图
eye-in-hand
标定板的世界坐标系:C
w
相机坐标系:C
c
机械手坐标系:C
e
手眼标定目的:相机坐标系 C
c
与机械手坐标系 C
e
之间的转换矩阵 T(旋转矩阵 R 和平移向
量 t)
由相机标定可得到:相机坐标系 C
c
与世界坐标系 C
w
间的旋转矩阵和平移向量。
机械手由位置 1 移动到位置 2:
C
c1
与 C
w
间的转换矩阵为 A C
c2
与 C
w
间的转换矩阵为 B 由标定求出内、外参数
C
c1
与 C
c2
间的转换矩阵为 C C=AB
-1
由 A、B 求得 C
C
e1
与 C
e2
间的转换矩阵为 D 直接读出
C
c1
与 C
e1
间的转换矩阵为 X C
c2
与 C
e2
间的转换矩阵为 X 是手眼标定所要求的参数
设空间点 P 在 C
c1
、C
c2
、C
e1
、C
e2
的坐标分别为 P
c1
、P
c2
、P
e1
、P
e2
P
c1
=C P
c2
(1)
P
c1
=X P
e1
(2)
P
e1
=D P
e2
(3)
P
c2
= XP
e2
(4)
由式(1)与(4)得
P
c1
=CX P
e2
(5)
由式(2)与(3)得
P
c1
=XD P
e2
(6)
比较式(5)与(6)得
CX=XD (7)
(8)
展开:
下载后可阅读完整内容,剩余5页未读,立即下载
2018-04-06 上传
2018-05-13 上传
2019-03-07 上传
2022-09-14 上传
2023-09-23 上传
2009-02-21 上传
2021-03-03 上传
2013-12-16 上传

weixin_42860207
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB新功能:Multi-frame ViewRGB制作彩色图阴影
- XKCD Substitutions 3-crx插件:创新的网页文字替换工具
- Python实现8位等离子效果开源项目plasma.py解读
- 维护商店移动应用:基于PhoneGap的移动API应用
- Laravel-Admin的Redis Manager扩展使用教程
- Jekyll代理主题使用指南及文件结构解析
- cPanel中PHP多版本插件的安装与配置指南
- 深入探讨React和Typescript在Alias kopio游戏中的应用
- node.js OSC服务器实现:Gibber消息转换技术解析
- 体验最新升级版的mdbootstrap pro 6.1.0组件库
- 超市盘点过机系统实现与delphi应用
- Boogle: 探索 Python 编程的 Boggle 仿制品
- C++实现的Physics2D简易2D物理模拟
- 傅里叶级数在分数阶微分积分计算中的应用与实现
- Windows Phone与PhoneGap应用隔离存储文件访问方法
- iso8601-interval-recurrence:掌握ISO8601日期范围与重复间隔检查
