火星计算机视觉:提升太空探索自主性关键技术
需积分: 10 175 浏览量
更新于2024-07-26
收藏 1.63MB PDF 举报
在《计算机视觉在火星》这篇论文中,作者探讨了如何利用计算机视觉技术来提升火星探测器的自主性,从而推动太阳系探索的边界。随着太空任务的复杂性和范围不断扩大,对航天器智能化的需求日益增长。计算机视觉作为一种关键的感知技术,能够帮助火星探测器识别、理解并解析其周围环境,执行导航、目标检测、地形分析和科学数据采集等任务。
论文首先介绍了计算机视觉的基本原理,它涉及到图像处理、模式识别和机器学习等领域,这些技术在地面和空间环境中都能应用。在火星上,由于环境的极端条件(如低光照、尘暴、地形变化),计算机视觉面临前所未有的挑战。因此,研究人员必须开发适应性强的算法和硬件系统,以确保视觉系统的稳定性和可靠性。
文中提到了具体的应用场景,比如通过计算机视觉技术,火星车可以自动识别和避开障碍物,进行路径规划;使用视觉数据来构建三维地图,帮助车辆定位和导航;通过目标识别,寻找矿物资源、地质构造或者可能的生命迹象。此外,计算机视觉还用于火星表面的纹理分析,以便于地质学家解读地貌特征和历史变迁。
论文强调了国际合作的重要性,提到了来自加州理工学院喷气推进实验室(Jet Propulsion Laboratory, JPL)和卡内基梅隆大学的研究团队,他们在项目中分享了各自的技术专长。这些机构的研究不仅展示了计算机视觉技术在火星探测中的潜力,也为未来深空探索提供了宝贵的实践经验。
结论部分指出,随着计算机视觉技术的不断发展和完善,它将在未来的火星任务中发挥越来越重要的作用,助力科学家们更深入地探索太阳系,推动人类对火星及其潜在生命的理解。然而,进一步研究仍需解决许多技术难题,如在恶劣环境下实时处理大量数据、提高算法鲁棒性以及确保系统能够在长时间无人干预下自主工作。
《计算机视觉在火星》这篇论文详细阐述了如何通过计算机视觉技术增强火星探测器的能力,以实现更深层次的太空探索,展现了该领域在拓展人类知识边界方面的巨大潜力。

Computer Vision on Mars
mission and supporting technology development. Demo
III, RCTA, and PerceptOR addressed off-road navigation
in more complex terrain and, to some degree, day/night,
all-weather, and all-season operation. A Demo III follow-
on activity, PerceptOR, and LAGR also involved system-
atic, quantitative field testing. For results of DemoIII,
RCTA, and PerceptOR, see (Shoemaker and Bornstein,
2000; Technology Development for Army Unmanned
Ground Vehicles, 2002; Bornstein and Shoemaker, 2003;
Bodt and Camden, 2004; Krotkov et al., 2007) and refer-
ences therein. LAGR focused on applying learning meth-
ods to autonomous navigation. The DARPA Grand Chal-
lenge (DGC), though not a government-funded research
program, stressed high speed and reliability over a con-
strained, 131 mile long, desert course. Both LAGR and
DGC are too recent for citations to be available here. We
review MER in the next section.
With rover navigation reaching a significant level of
maturity, the problems of autonomous safe and precise
landing in planetary missions are rising in priority. Fea-
ture tracking with a downlooking camera during descent
can contribute to terrain-relative velocity estimation and
to landing hazard detection via structure from motion
(SFM) and related algorithms. Robotic helicopters have
a role to play in developing and demonstrating such ca-
pabilities. Kanade has made many contributions to struc-
ture from motion, notably the thread of factorization-
based algorithms initiated with Tomasi and Kanade
(1992). He also created one of the largest robotic heli-
copter research efforts in the world (Amidi et al., 1998),
which has addressed issues including visual odometry
(Amidi et al., 1999), mapping (Miller and Amidi, 1998;
Kanade et al., 2004), and system identification modeling
(Mettler et al., 2001). For safe and precise landing re-
search per se, JPL began developing a robotic helicopter
testbed in the late 1990s that ultimately integrated inertial
navigation, SFM, and a laser altimeter to resolve scale in
SFM. This achieved the first fully autonomous landing
hazard avoidance demonstration using SFM in Septem-
ber of 2003 (Johnson et al., 2005a,b; Montgomery et al.,
to appear).
Finally, Kanade guided in early work in the area that
became known as physics-based vision (Klinker et al.,
1990; Nayar et al., 1991; Kanade and Ikeuchi, 1991),
which exploits models of the physics of reflection to
achieve deeper image understanding in a variety of ways.
This outlook is reflected in our later work that exploits
physical models from remote sensing to improve outdoor
scene interpretation for autonomous navigation, includ-
ing terrain classification with multispectral visible/near-
infrared imagery (Matthieset al., 1996), negative obstacle
detection with thermal imagery (Matthies and Rankin,
2003), detection of water bodies, snow, and ice by ex-
ploiting reflection, thermal emission, and ladar propaga-
tion characteristics (Matthies et al., 2003), and modeling
the opposition effect to avoid false feature tracking in
Mars descent imagery (Cheng et al., 2005).
3. Computer Vision in the MER Mission
The MER mission landed two identical rovers, Spirit and
Opportunity, on Mars in January of 2004 to search for
geological clues to whether parts of Mars formerly had
environments wet enough to be hospitable to life. Spirit
landed in the 160 km diameter Gusev Crater, which in-
tersects the end of one of the largest branching valleys on
Mars (Ma’adim Vallis) and was thought to have possi-
bly held an ancient lake. Opportunity landed in a smooth
plain called Meridiani Planum, halfway around the planet
from Gusev Crater. This site was targeted because orbital
remote sensing showed that it is rich in a mineral called
gray hematite, which on Earth is often, but not always,
formed in association with liquid water. Scientific results
from the mission have confirmed the presence of water
at both sites, and the existence of water-derived alter-
ation of the rocks at both sites, but evidence has not been
discovered yet for large lakes (Squyres and Knoll, 2005).
Details of the rover and lander design, mission op-
eration procedures, and the individual computer vision
algorithms used in the mission are covered in separate
papers. In this section, we give a brief overview of the
pertinent aspects of the rover and lander hardware, briefly
review the vision algorithms, and show experimental re-
sults illustrating qualitative behavior of the algorithms in
operation on Mars. Section 4 addresses more quantita-
tive performance evaluation issues and work in progress
to improve performance.
3.1. Overview of the MER Spacecraft and Rover
Operations
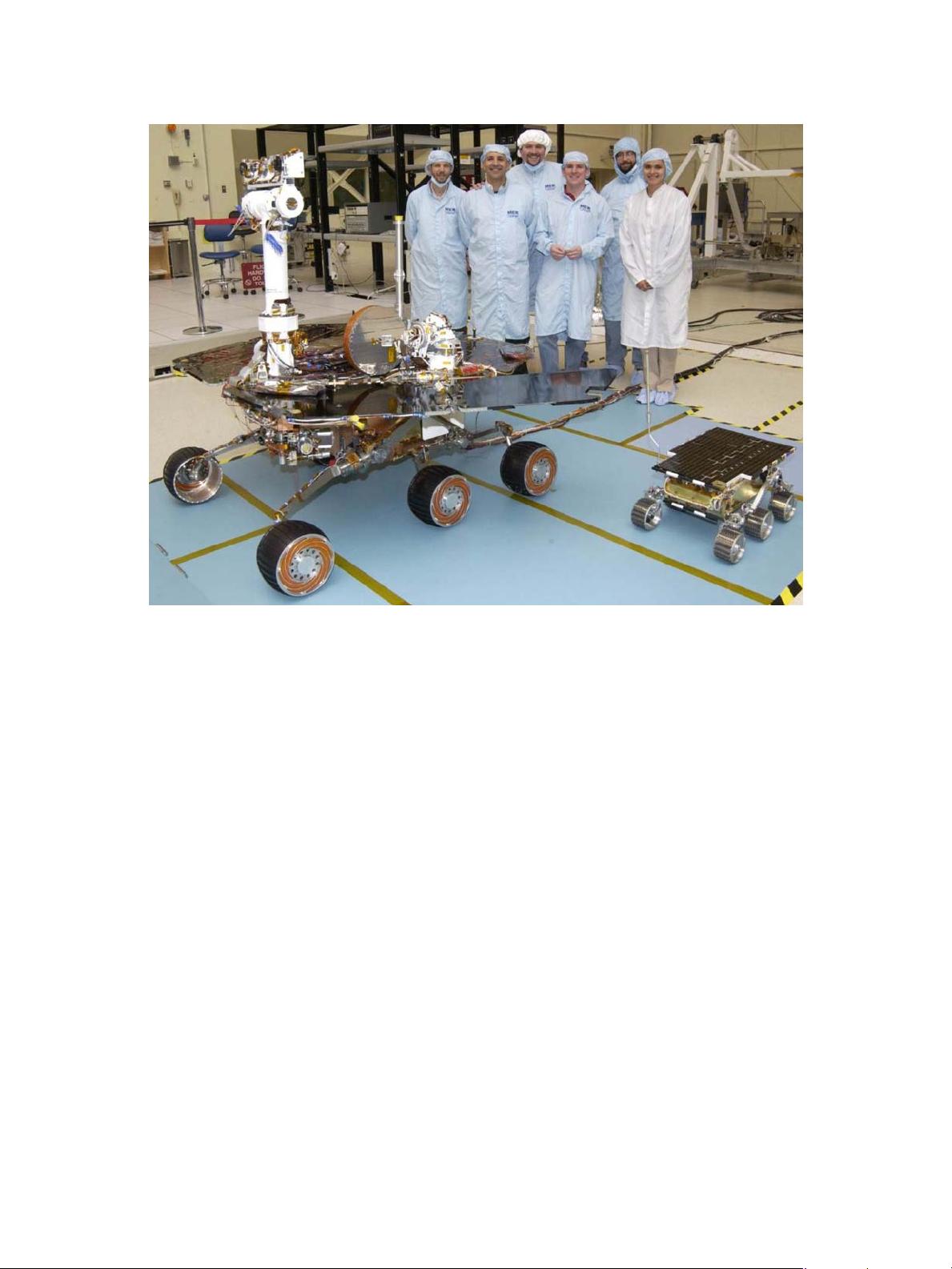
Figure 2 shows a photo of one of the MER rovers in a
JPL clean room, together with the flight spare copy of the
Sojourner rover from the 1997 Mars Pathfinder mission
for comparison. The MER rovers weigh about 174 kg, are
1.6 m long, have a wheelbase of 1.1 m, and are 1.5 m tall
to the top of the camera mast. Locomotion is achieved
with a rocker bogie system very similar to Sojourner,
with six driven wheels that are all kept in contact with
the ground by passive pivot joints in the rocker bogey
suspension. The outer four wheels are steerable.
The rovers are solar powered, with a rechargeable
lithium ion battery for nighttime science and commu-
nication operations. The onboard computer is a 20 MHz
RAD6000, which has an early PowerPC instruction set,
with no floating point, a very small L1 cache, no L2
cache, 128 MB of RAM, and 256 MB flash memory.
Navigation is done with three sets of stereo camera pairs:
one pair of “hazcams” (hazard cameras) looking forward
剩余25页未读,继续阅读
点击了解资源详情
1803 浏览量
点击了解资源详情
142 浏览量
211 浏览量
202 浏览量
2022-07-15 上传
128 浏览量
107 浏览量

sidan119
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- 昆仑通态MCGS嵌入版_XMTJ温度巡检仪软件包解压教程
- MultiBaC:掌握单次与多次组批处理校正技术
- 俄罗斯方块C/C++源代码及开发环境文件分享
- 打造Android跳动频谱显示应用
- VC++实现图片处理的小波变换方法
- 商城产品图片放大镜效果的实现与用户体验提升
- 全新发布:jQuery EasyUI 1.5.5中文API及开发工具包
- MATLAB卡尔曼滤波运动目标检测源代码及数据集
- DoxiePHP:一个PHP开发者的辅助工具
- 200mW 6MHz小功率调幅发射机设计与仿真
- SSD7课程练习10答案解析
- 机器人原理的MATLAB仿真实现
- Chromium 80.0.3958.0版本发布,Chrome工程版新功能体验
- Python实现的贵金属追踪工具Goldbug介绍
- Silverlight开源文件上传工具应用与介绍
- 简化瀑布流组件实现与应用示例
