VJC4.3巡线小车搭建与模块库详解
"本文主要介绍了VJC4.3巡线模块的搭建方法和相关模块库的使用,适用于基于灰度传感器的小车巡线系统。巡线小车的搭建需注意灰度传感器的布局,以及LED灯光的位置。巡线模块库包含初始化、环境采集等关键功能,用于设置电机接口、功率,以及采集地面灰度值以适应白底黑线的环境。"
在VJC4.3巡线模块中,首先我们要了解如何正确搭建巡线小车。车辆底部的灰度传感器是关键部分,它们需要按照特定规则布置。传感器的LED灯光应全部朝前,中间三个灰度传感器紧密排列,两侧的灰度传感器与中间传感器间隔一个半高立方体。灰度传感器的中心线与车轮轴中心之间的距离为12cm,且从左至右依次连接到控制器的IO0、IO1、IO2、IO3、IO4接口。
接下来是巡线模块库的介绍,这个库专为使用5个灰度传感器的巡线小车设计。库中包含9个模块,第一个是初始化模块,它配置了电机接口、输出功率、转向设置,以及灰度传感器的接口。用户需要根据实际电机类型(闭环或非闭环)来设定相关选项,并确定电机的正反转。马达通道指定了电机连接到控制器的哪个DC口,功率设置则影响电机的实际运行速度。灰度通道则用于指定传感器连接的I/O口。
环境采集模块是巡线过程中的重要环节,主要用于获取场地的黑白阈值。它需要在初始化模块之后运行,用户需按照控制器的提示操作。首先选择是否进行环境采集,接着将灰度传感器依次放在黑线和白底上,让程序自动采集数据。当黑色采集值超过3500,白色采集值低于700时,说明采集成功,此时的阈值可用于后续的线路识别。
此外,巡线模块库可能还包括其他模块,如路径规划、转向控制、速度调节等,这些模块共同协作使得小车能够在地面上准确、高效地跟随黑线行驶。通过这种方式,开发者可以构建出一个能够适应不同环境条件的智能巡线系统,提高小车的自主导航能力。在实际应用中,用户可以根据具体需求对模块进行调整和优化,以实现最佳的巡线效果。
VJC4.3 小车基本搭建与巡线模块库介绍
一、搭建小车
如图所示是适用于 VJC4.3 巡线模块库的巡线小车整体图
车的整体
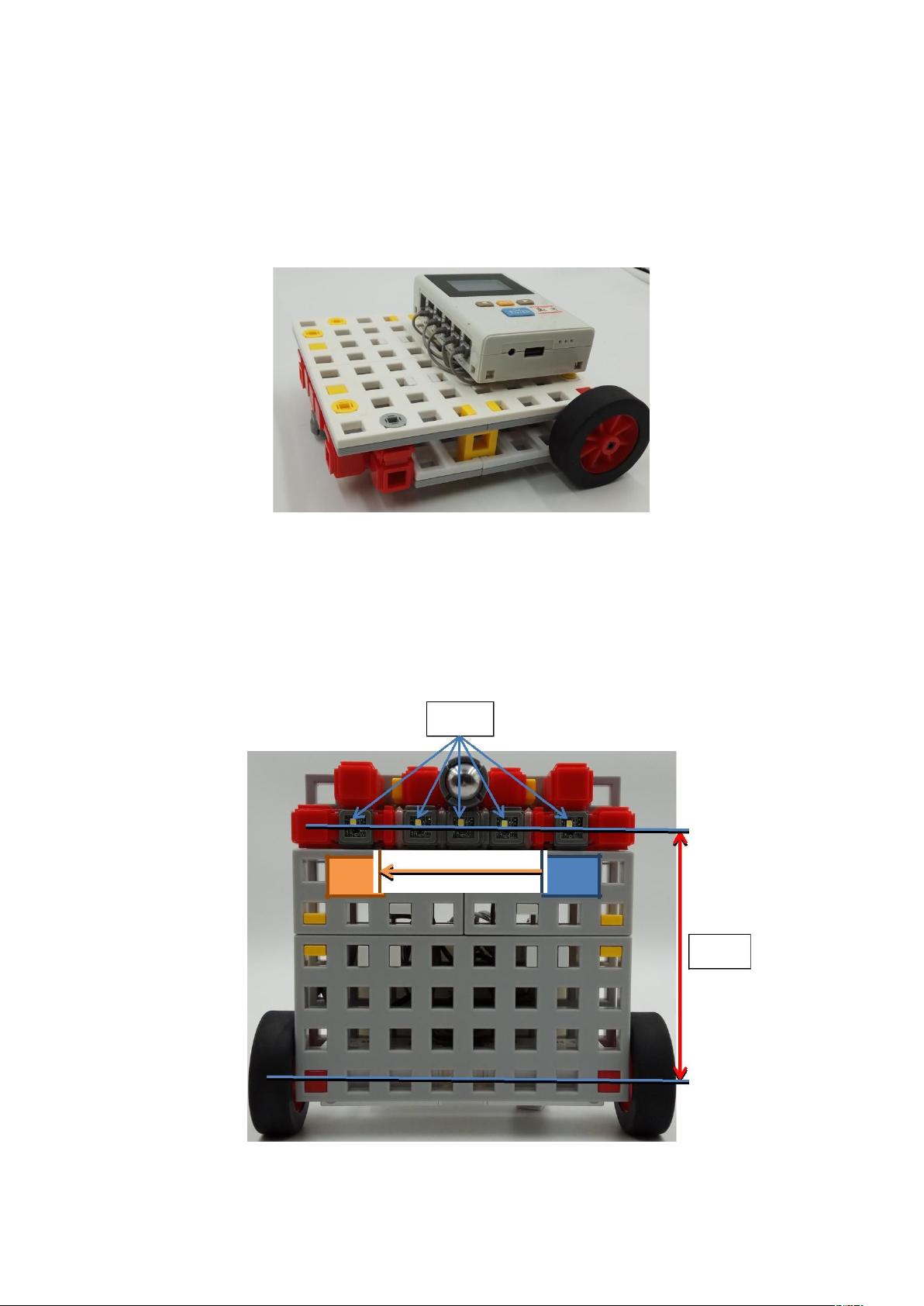
如下图所示,是巡线小车的底部图,小车底部搭建要领
1、搭建的灰度传感器底部的 LED 灯光必须全部在前。
2、中间三个灰度紧挨着搭建,最左最右两侧灰度与中间三个灰度间隔一个半高立方体。
3、五灰度的中心线距两个车轮轴中心的距离为 12cm。
4、灰度从左到右(车前进的方向)依次接控制器 IO0、IO1、IO2、IO3、IO4。
LED 灯
IO4 IO0
12cm
车底板
下载后可阅读完整内容,剩余5页未读,立即下载
点击了解资源详情
2024-11-07 上传
2019-10-16 上传
2019-04-16 上传

shitoujiandaobu2012
- 粉丝: 6
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 简洁的中国画背景中国风下载PPT模板
- BioBioChile-crx插件
- Nucleotide-Sequence-generator:随机DNA:dna:核苷酸生成器和反向互补查找器:microscope:
- 2_displacement_strain_analysis
- python学习
- Convolution:该程序找到两个离散序列的线性卷积-matlab开发
- Ejercicio2-LluviaPalabras-Java
- Python库 | viztracer-0.3.1-cp37-cp37m-manylinux2010_x86_64.whl
- kdmhmfrshx
- 行业分类-设备装置-电机转子嵌绝缘纸机.zip
- mysql-5.7-linux安装包及安装过程
- Earthworm-Web.github.io:这是Earthworm-Web的后台管理存储库
- 绿色田园风光自然风景下载PPT模板
- Better Eenadu E-Paper-crx插件
- plotmultix(varargin):绘制具有多个 x 轴的图-matlab开发
- Saltar Modal de La Nación-crx插件
