VJC4.3巡线模块详解:搭建教程与功能介绍
需积分: 48 74 浏览量
更新于2024-09-07
收藏 529KB PDF 举报
VJC4.3巡线模块介绍与搭建方式着重讲解了一种针对机器人领域的自动化控制技术,主要应用于地面灰度巡线小车的设计。首先,对于小车的搭建,构建的关键在于灰度传感器的布局。传感器的LED灯光应全部朝向前方,以便获取地面的灰度信息。传感器排列需遵循特定规则,即最左边和右边的灰度传感器与中间三个紧邻,且与车轮轴中心线保持12cm的距离。连接方式是按照车前进方向,依次连接到控制器的IO0至IO4端口。
接着,核心部分是巡线模块库的介绍。这个库专门设计用来处理巡线任务,要求地面铺设5个连续的灰度传感器。其中,初始化模块是基础配置,用户需设置闭环电机的接口配置、功率和转向,以及灰度传感器的I/O接口。闭环电机的选择至关重要,速度闭环电机需勾选,普通电机则无需。马达通道分为两个,对应左、右电机的DC接口。功率设置允许用户调整电机的实际输出速度,解决电机转向问题。
环境采集模块是实现实际巡线的关键,它用于确定黑线(白底黑线场地)的阀值。在程序运行前,必须先执行初始化模块。然后,用户需要按照提示将灰度传感器放在黑线和白地上,系统会自动采集并存储数据。采集过程中,如果黑线的灰度值高于3500,而白底的灰度值较低,这标志着小车成功识别出线路。
VJC4.3巡线模块与小车的搭建不仅涉及硬件的精确装配,还有软件编程的逻辑设计,包括如何利用传感器数据驱动机器人的路径决策,以及如何通过环境采集模块优化机器人的巡线性能。这些技术对于理解和操作自动化机器人具有重要意义,对于机器人爱好者和科研人员来说,深入理解并掌握这类技术是提升项目成功率的关键。
VJC4.3 小车基本搭建与巡线模块库介绍
一、搭建小车
如图所示是适用于 VJC4.3 巡线模块库的巡线小车整体图
车的整体
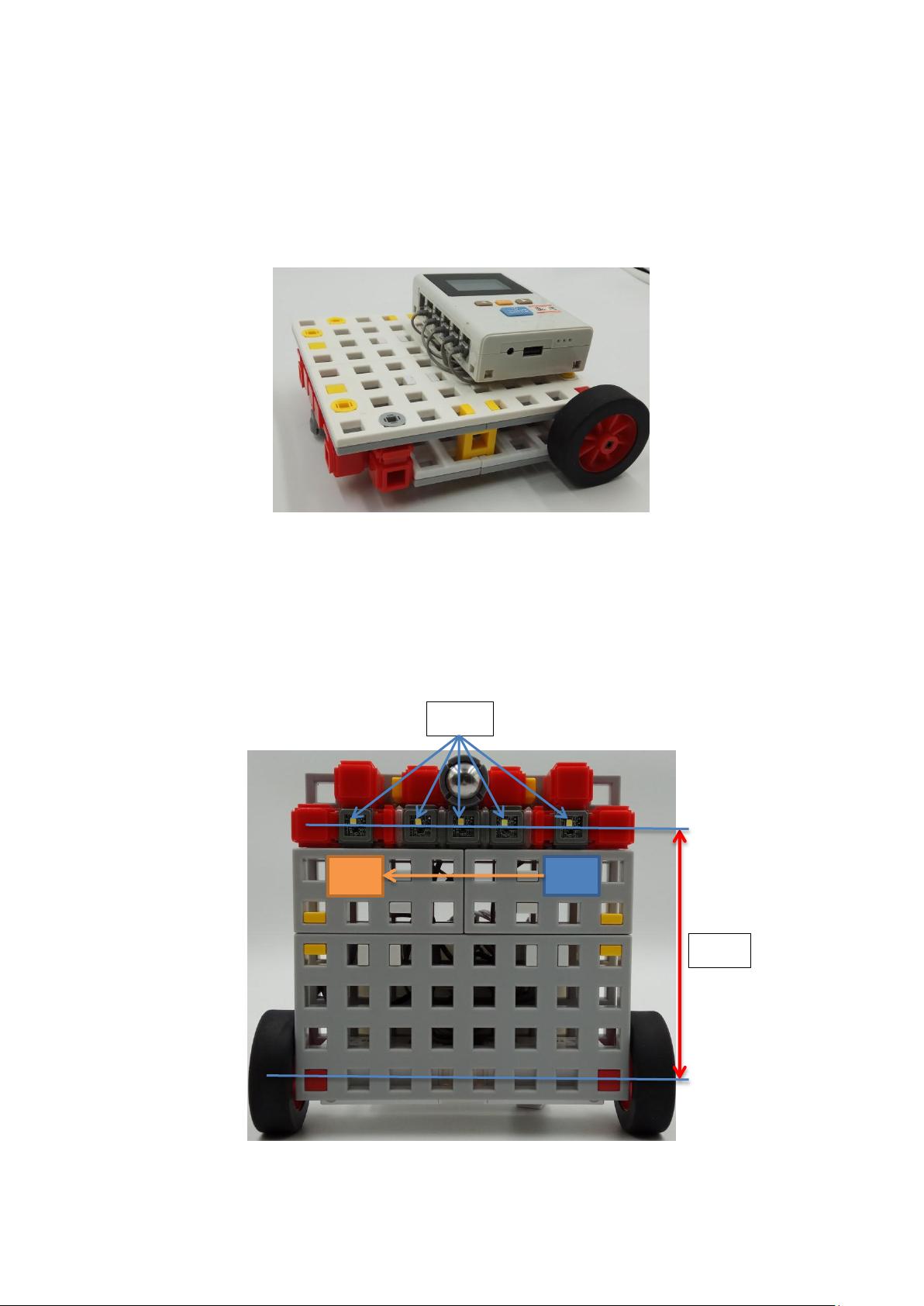
如下图所示,是巡线小车的底部图,小车底部搭建要领
1、搭建的灰度传感器底部的 LED 灯光必须全部在前。
2、中间三个灰度紧挨着搭建,最左最右两侧灰度与中间三个灰度间隔一个半高立方体。
3、五灰度的中心线距两个车轮轴中心的距离为 12cm。
4、灰度从左到右(车前进的方向)依次接控制器 IO0、IO1、IO2、IO3、IO4。
车底板
12cm
LED 灯
IO0
IO4
下载后可阅读完整内容,剩余4页未读,立即下载
2019-04-16 上传
2019-10-16 上传
点击了解资源详情
2024-11-07 上传
2019-03-25 上传
2019-04-08 上传

六月的雨2013815
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







