EtherCAT技术详解与应用指南
需积分: 1 3 浏览量
更新于2024-07-18
2
收藏 3.15MB PDF 举报
"EtherCAT使用手册,版本号:V1.05;主要涵盖EtherCAT技术的介绍、安装连接、EC信息、网络同步、CiA402设备规约及通讯例程等内容。"
EtherCAT是一种实时工业以太网通信协议,广泛应用于自动化控制领域。手册的章节一详细介绍了EtherCAT的基本概念,包括它是一种高性能、高精度的实时通信协议,旨在满足自动化系统对快速响应和精确同步的需求。产品概述中可能会提到各种支持EtherCAT的产品,如控制器、I/O模块和驱动器等。CoE(CAN over EtherCAT)技术术语解释了如何通过EtherCAT实现CANopen协议,使得传统的CAN设备能够接入EtherCAT网络。
在安装与连接部分,手册将指导用户如何正确安装和配置 EtherCAT 设备,包括接线规范、使用的接插件标准以及推荐的电缆类型。这部分对于确保网络的稳定运行至关重要,因为物理连接的可靠性直接影响到通信性能。
第三章深入讨论了EtherCAT-EC信息,特别是CANopen over EtherCAT的参考模型,解释了如何将CANopen设备集成到EtherCAT网络中。同时,提供了关于从站信息、网络状态机的详细信息,以及PDO(Process Data Object)映射,用于在主站和从站之间传输过程数据。紧急事件报文的讨论则关注在网络异常时如何快速有效地传递警告信息。
第四章涉及基于分布时钟的网络同步,这是EtherCAT区别于其他工业以太网协议的一个关键特性。通过分布时钟技术,网络中的所有设备都能保持亚微秒级别的同步,这对于需要精确时间协调的运动控制和精密定位应用是至关重要的。
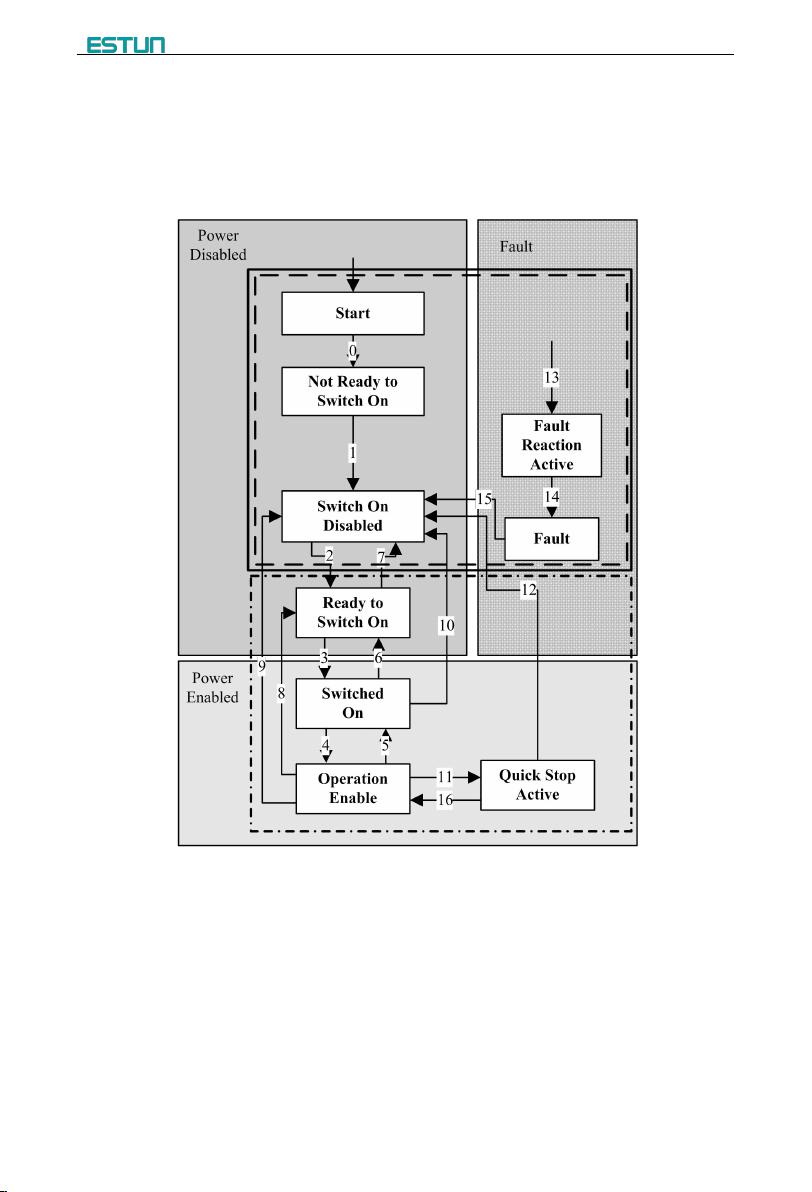
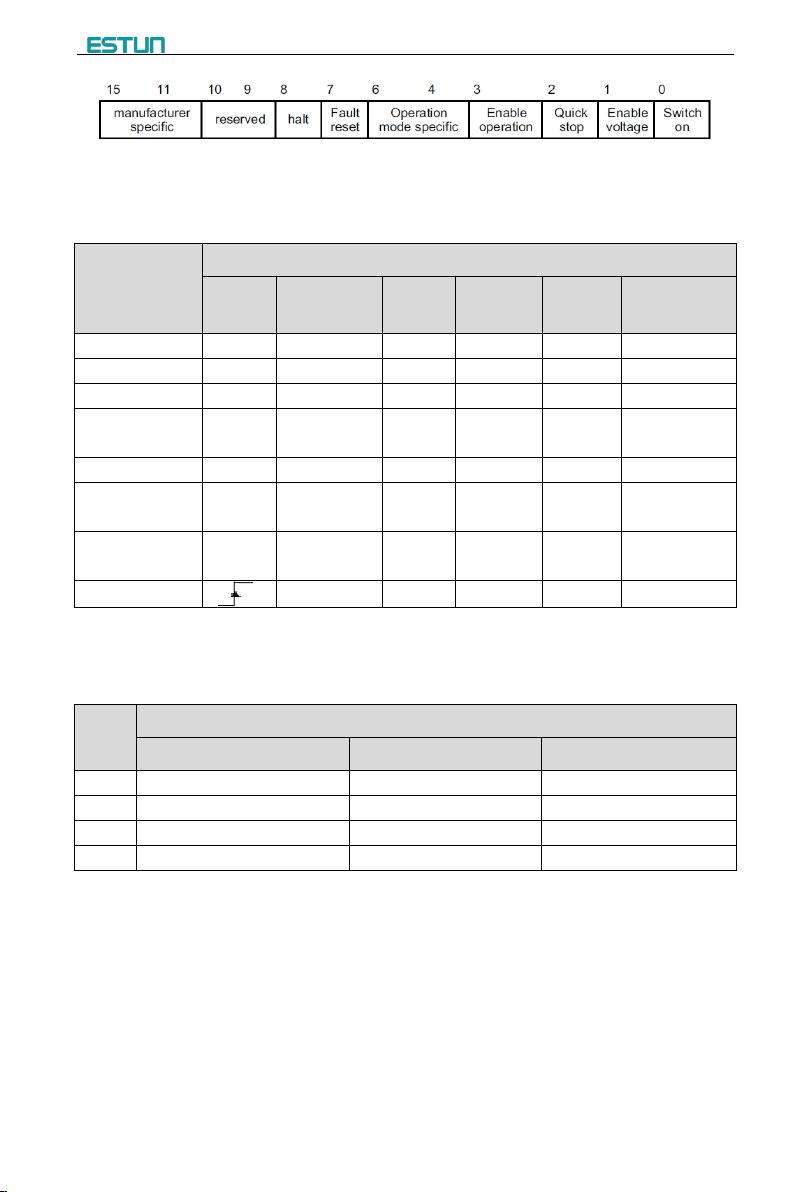
CiA402设备规约是针对运动控制设备的标准,第五章对此进行了详细解读,涵盖了CoE状态机、设备控制相关参数,如控制字、状态字、故障反应选项代码等。这些参数允许用户精细控制设备的行为,例如启动、停止、快速停止和故障恢复。回零模式、速度控制模式、位置控制模式和位置插补控制模式的描述,为用户提供了解如何精确控制电机和其他运动设备的方法和参数。
这本 EtherCAT 使用手册为用户提供了全面的理论知识和实际操作指南,无论是新手还是经验丰富的工程师,都能从中获益,以便更好地理解和应用 EtherCAT 技术。

EtherCAT 使用手册
13
4 基于分布时钟的网络同步
EtherCAT
网络中的一个节点的时钟作为整个网络的参考时钟(系统时钟),为网
络提供系统时间,而从站设备的分布时钟都与这个参考时钟同步。通过分布时钟,可以
实现从站的本地应用程序与参考时钟的同步事件同步。
EC-netX50
模块实现了下面的同步模式。同步模式的切换可以通过同步控制寄存器
(
ESC 0x980
和
0x981
)进行控制。
Free-Run
(
ESC register: 0x980 = 0x0000
)
这种模式下,本地应用程序周期与通讯周期以及主站周期各自独立。
DC
模式(
ESC register: 0x980 = 0x0300)
)
这种模式下,本地应用程序与
Sync0
时间同步。
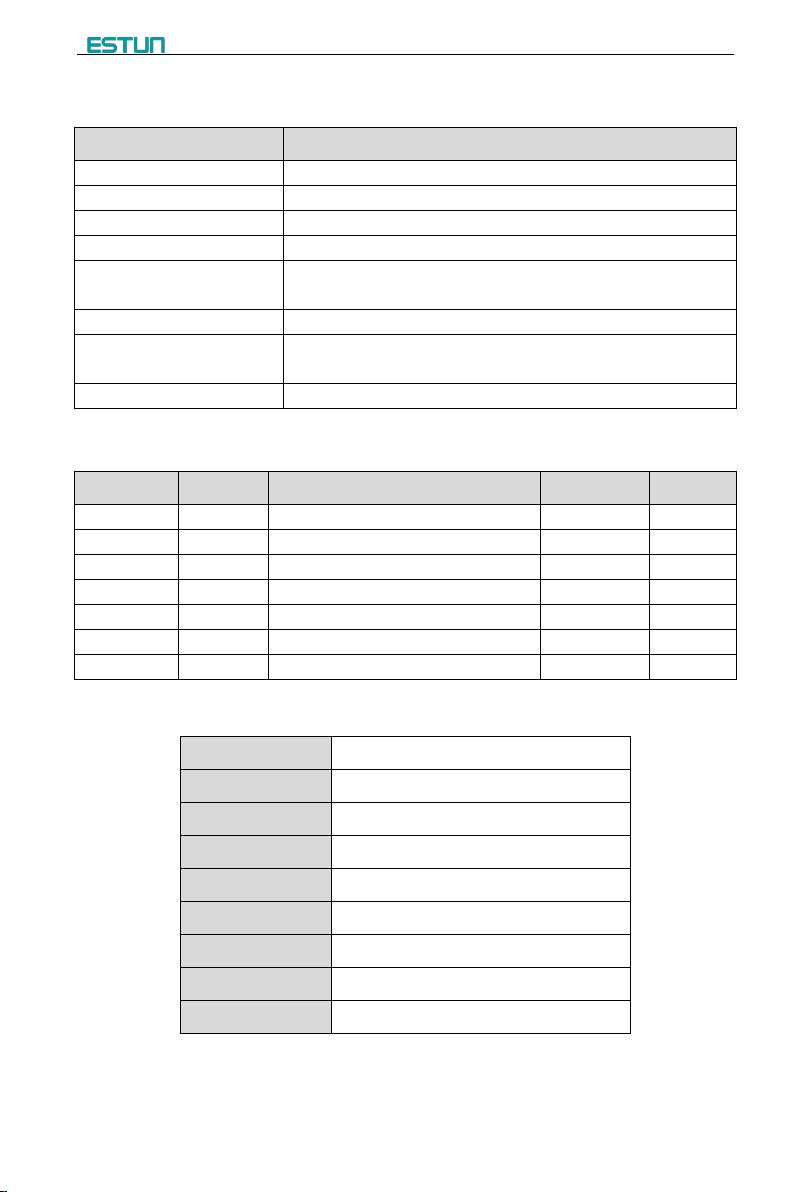
Index
Sub
Name
Access
PDO
Mapping
Type
Value
0x1C32
Sync Manager channel 2 (process data output) Synchronization
1
Synchronization
type
RO
No
UINT
Current status
of DC mode
0: Free-run
2: DC Mode
(Synchronous
with Sync0)
2
Cycle time
RO
No
UINT
Sync0 event
cycle [ns]
(The value is
set by master
via ESC
register.)
range:
125000*n (n =
2–16) [ns]
0x1C33
Sync Manager channel 3 (process data input) Synchronization
3
Shift time
RO
No
UINT
-
6
Calc and copy
time
RO
No
UINT
-
下图为 DC 模式下的时序图。

剩余96页未读,继续阅读
275 浏览量
149 浏览量
840 浏览量
125 浏览量
263 浏览量
161 浏览量
195 浏览量

風之逍遥
- 粉丝: 35
- 资源: 12
 我的内容管理
展开
我的内容管理
展开







最新资源
- bodhishare_react:社交应用
- MBA研究生复习资料.rar
- XX国道工程施工监理规划
- Windows server 2019 .NET Frameword 3.5(兼容Windows server 2016)sxs.zip
- WeDoo-TDD-kata
- rachel-intro
- 着作权法制中“科技保护措施”与“权利管理信息”之探讨
- ECell-Associates-2020
- Công Cụ Đặt Hàng Của Bee Order-crx插件
- 基于H5的拖拽效果
- NUFFT的matlab算法
- check:记录项目活动时间的命令
- python3_lessons:这是我学习python3困难方法的课程的集合
- The-beginning-of-machine-learning-advanced:机器学习入门(进阶):基于深度学习的卫星图像识别,基于逻辑回归的情感分析,基于词袋模型的问答系统
- SDL2移植库源文件
- natapp_windows_amd64_2_3_8.zip
