开源框架优化设计:垂直起降无人机系统与远程救援
138 浏览量
更新于2024-06-18
收藏 2.23MB PDF 举报
"本文主要探讨了使用开源框架优化设计及验证垂直起降无人机系统,用于远程监视和救援任务。文章作者通过开发一个完全基于开源软件、库和内部代码的飞机设计框架,实现了全电动VTOL/FW模式无人机的快速原型化。无人机设计目标包括能够执行100公里以上的远程监视任务,携带最大1公斤的救援负载,并能与集群中的其他无人机通过ad-hoc Wi-Fi网络协同工作。设计过程中采用了低保真粒子群优化算法(PSO)进行优化,并对推进系统进行了全面设计,之后通过商业软件进行验证。为了验证设计,作者制作了一个物理原型,采用玻璃纤维和XPS泡沫材料,集成传感器并利用ArduPilot软件进行调整。研究表明,这种低保真度设计是一个安全可靠的起点,适合有限时间内的原型制作。文章还讨论了使用开源软件的技术挑战以及混合构型无人机在飞行试验中的表现。"
文章详细介绍了无人机设计中遇到的主要挑战,如增加垂直推力部件导致的重量和寄生阻力问题,以及微型飞行器在低雷诺数下遇到的复杂性。作者指出,对于本科生和缺乏经验的设计师来说,获取综合设计资源的难度加大,商业软件虽然功能强大但限制了学习和定制。开源工具的使用提供了从零开始学习和开发设计的机会,而且这种趋势正在增强。
此外,文章还强调了学术环境中通常缺少从概念设计到自动驾驶仪测试的完整流程。通过这个开源框架,作者不仅设计了无人机,还验证了其功能,展示了开源软件在飞机设计和验证过程中的潜力。这为未来的无人机设计提供了新的思路和方法,尤其是对于教育和研究领域,开源解决方案可以降低进入门槛,促进创新。
N. Sethi
和
S.
阿拉瓦特
阵列
14
(
2022
)
100183
(
)
下
一
(
)
下
一
上述回归分析得出空重(
)为 因此,携带的估计总质量
为
(
有效载荷
)根据先前的经验、可能的自重以及由于潜
在的碰撞而导致的修理后的重量
公斤(
)
7.
初步设计
初步设计阶段使用广泛的数学优化。 优化过程的目标是设计一个几
何形状和推进系统,以最大限度地提高航程这意味着最小化功率和最大
化巡航效率。 在我们的案例中,我们将优化和设计过程分为三个阶
段。
7.1.
初始规模
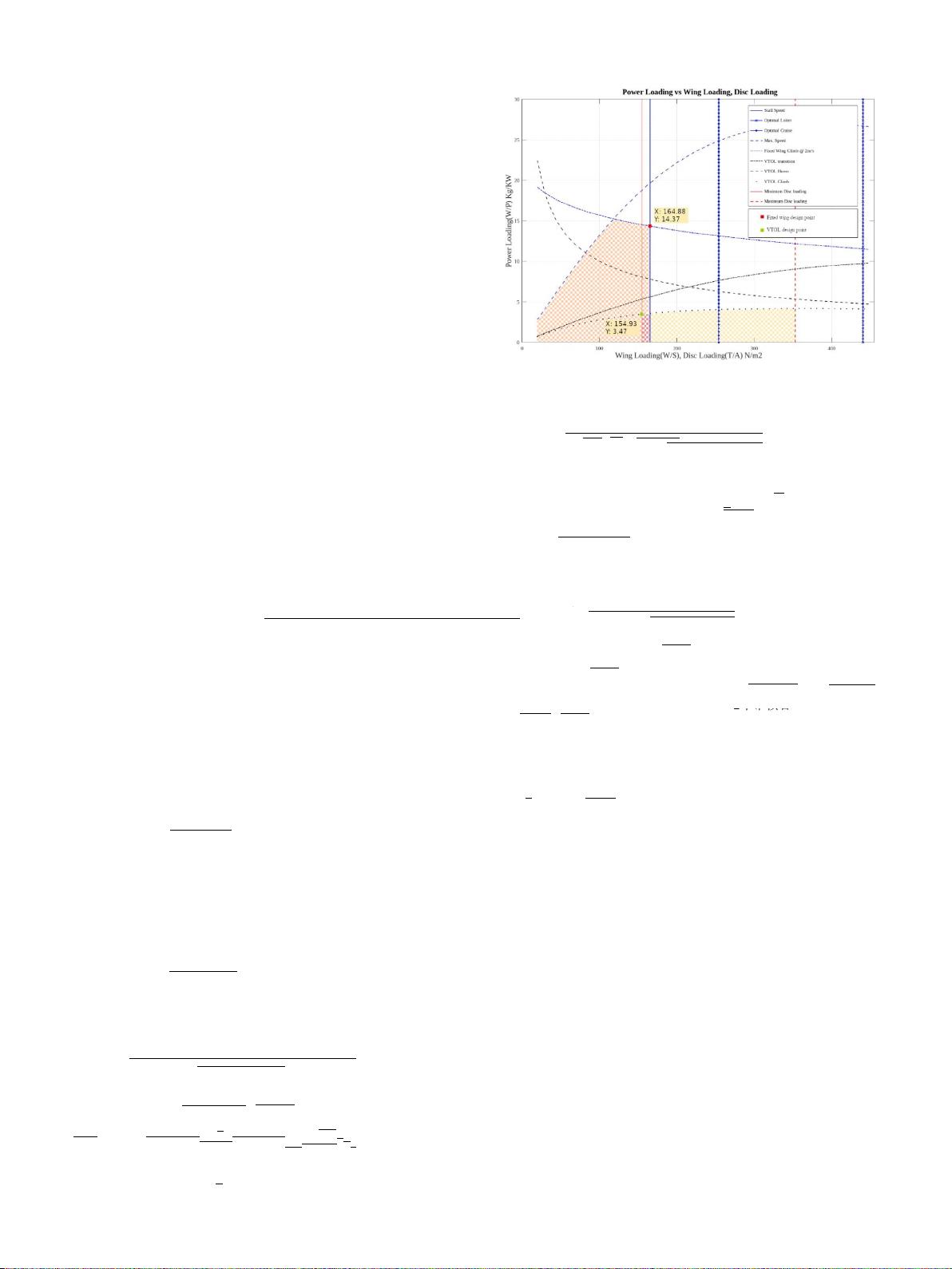
第一阶段给出了两个驱动因素的良好估计, 任何设计:机翼载荷和
动力载荷。适当的关系,
图二.
线性规划模型
(
)
+
三旋翼直升机的过渡、悬停和爬升阶段的尺寸确定是
还包括使用类似于中由于一个粗略但数学上合理的估计是错误
的
的
第
章
(
一
)
(十
二)
在这个阶段,设计空间是基于,中的公式使用线性规划创建
的。因此,我们在这里只对方程作简要的
()
下一
页
个
()
(十
三)
当量()给出了飞机失速时的机翼载荷这里
就是
通常是设置机翼面积下限的约束。在
中
国
(
)
第
项
失速速度高,巡航上限也高的情况
够了,。()可以设置这个下限。等式()、()、()
最佳的机翼载荷最大限度地提高耐力,爬升在一个
在海平面()上以一定的速率()运动,
罪
)
公司简介
(
)
高度分别。他们在,中得到 这里
是
螺旋桨
效率,
,展弦
比,
(
)
,
和
。
的
个单核苷
酸
(
单核苷
酸
)
(十
四)
是奥斯特瓦尔德请注意,这些值,尤其是
和
(
)
只是有根据的
猜测
,
必须
根据最终结果进
行迭代和
更改。
(
磅)
(
)
)
(十
五)
()
下一
页
)
个
(
六
)
(
)
(十
六)
李
()
下一
页
()
(
)
电子邮件
输出舒适的设计(图 )空间选点
从依赖于期望的性能。为了使分析更加
磁盘加载的约束、最小和最大值也
()
下一
页
个
(
九
)
根据电机及其额定螺旋桨尺寸使用的
垂直起落飞机和固定翼飞机的设计点相距甚远,
中文
(
简体
)
攀登极限为每个节点选择最大功率点
配置以包含安全系数。
()
下一页
(
(
剩余15页未读,继续阅读
2024-05-05 上传
点击了解资源详情
2023-08-17 上传
2023-08-17 上传
2024-06-18 上传
2023-08-04 上传
2024-07-01 上传

cpongm
- 粉丝: 5
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握Jive for Android SDK:示例应用的使用指南
- Python中的贝叶斯建模与概率编程指南
- 自动化NBA球员统计分析与电子邮件报告工具
- 下载安卓购物经理带源代码完整项目
- 图片压缩包中的内容解密
- C++基础教程视频-数据类型与运算符详解
- 探索Java中的曼德布罗图形绘制
- VTK9.3.0 64位SDK包发布,图像处理开发利器
- 自导向运载平台的行业设计方案解读
- 自定义 Datadog 代理检查:Python 实现与应用
- 基于Python实现的商品推荐系统源码与项目说明
- PMing繁体版字体下载,设计师必备素材
- 软件工程餐厅项目存储库:Java语言实践
- 康佳LED55R6000U电视机固件升级指南
- Sublime Text状态栏插件:ShowOpenFiles功能详解
- 一站式部署thinksns社交系统,小白轻松上手
