MEMS微加速度计在起重机无视觉传感器防摇控制中的应用
52 浏览量
更新于2024-08-30
1
收藏 268KB PDF 举报
"传感技术中的基于MEMS微加速度计的无视觉传感器防摇控制系统研究"
在起重机作业中,防摇控制是一项重要的技术挑战,旨在确保吊重的安全稳定,避免因摆动造成的作业困难和安全隐患。传统的防摇措施,如机械式防摇装置,虽然能够消耗摆动能量,但其效果往往受限于操作人员的技术水平,且在不同负载情况下表现不一。为解决这些问题,现代技术引入了电子防摇系统,尤其是基于MEMS(Micro-Electro-Mechanical Systems)微加速度计的无视觉传感器防摇控制系统。
该系统首先通过建立起重机吊重摆动的数学模型,分析吊重摆角与小车运行速度之间的动态关系。利用微加速度计,能够实时监测起重机的加速度变化,从而准确地获取吊重的摆动信息。微加速度计是一种微型传感器,它能感知并转换微小的机械运动为电信号,具有体积小、成本低、精度高的特点,非常适合在复杂工况下进行动态监测。
在防摇控制中,微加速度计的数据被整合到一个闭环控制系统中,系统能够根据摆角的大小实时调整小车的速度指令。这样,当检测到摆动过大时,控制器可以适时地减缓或改变小车的运行速度,以减少摆动幅度,实现对吊重摆动的有效抑制。与传统的视觉传感器方案相比,这种方法无需额外安装昂贵的发射和接收设备,简化了系统结构,降低了成本,同时提高了系统的可靠性和实用性。
实验结果表明,基于MEMS微加速度计的无视觉传感器防摇控制系统能够有效地消除载荷的摇动,提高起重机作业的安全性和效率。这一技术不仅简化了防摇系统的实施,也提升了防摇控制的自动化水平,为起重机行业的技术进步提供了新的解决方案。未来,随着传感器技术的进一步发展,这种无视觉传感器的防摇控制方法有望在更广泛的领域得到应用。
传感技术中的基于传感技术中的基于MEMS微加速度计的无视觉传感器防摇控制微加速度计的无视觉传感器防摇控制
系统研究系统研究
摘 要:通过建立起重机吊重摆动的数学模型,明确吊重摆角与小车运行加减速之间的关系,并将MEMS微加
速度计应用到起重机的防摇控制中,建立闭环控制系统,适时根据吊重摆角大小修正小车速度指令,实现防摇
控制。实验证明,这种方法简单、经济,不需要安装视觉传感器测量吊重摆角,可以有效地消除载荷的摇动。
关键词:起重机;防摇控制;微机电系统(MEMS);微加速度计;视觉传感器 引 言 起重机在工作
过程中,由于小车运行的加速或减速,经常会导致吊重的摇摆,这不仅增加吊重卸料难度,而且给起重机的作
业带来了不安全因素。因此,在起重机作业时,吊重的摆幅必须控制在一定范围内,到达目
摘 要:通过建立起重机吊重摆动的数学模型,明确吊重摆角与小车运行加减速之间的关系,并将MEMS微加速度计应
用到起重机的防摇控制中,建立闭环控制系统,适时根据吊重摆角大小修正小车速度指令,实现防摇控制。实验证明,这种方
法简单、经济,不需要安装视觉传感器测量吊重摆角,可以有效地消除载荷的摇动。
关键词:起重机;防摇控制;微机电系统(MEMS);微加速度计;视觉传感器
引引 言言
起重机在工作过程中,由于小车运行的加速或减速,经常会导致吊重的摇摆,这不仅增加吊重卸料难度,而且给起重机
的作业带来了不安全因素。因此,在起重机作业时,吊重的摆幅必须控制在一定范围内,到达目的地时吊重应立即停摆。为
此,人们已经提出了多种防摇措施:如采用交叉钢丝绳减摇装置、分离小车减摇装置、翘板梁式减摇装置等机械防摇系统。由
于机械式防摇其本质都是通过机械手段来消耗摆动能量以达到最终消除摆动的目的,没有将减摇与小车运行控制结合起来考
虑,减摇效果在很大程度上取决于操作人员的熟练程度,而且在起重机满载和空载两种情况下的减摇效果差别很大,难以满足
用户要求。后来出现了带视觉传感器电子防摇技术,通过各种传感器和检测元件将检测到的信息传送到控制系统中的微机,经
微机内部控制软件处理后将最佳的控制参数(如PID控制参数)提供给小车调速系统,通过调节小车的速度和方向,控制小车的
运行,来减少吊具及负载的摆动幅度。但由于目前所采用的是通过在小车架上安装一个发射装置(激光发射器、摄像头等)和一
个接收装置,在吊具上架安装一个反射器,吊具前后摆动时,检测吊具前后摆动的角度。由于需要附加安装价格昂贵的视觉传
感器检测和接收系统,所需付出的代价是很大的;在天气恶劣的情况下(如遇浓雾、暴雨、直射阳光等) ,视觉传感器的使用也
常常受到某些限制,难以获得最佳控制效果。
本文通过建立起重机载荷摆动的数学模型,明确吊重摆幅与小车运行加减速之间的关系,并将基于微机电系统(MEMS)加
工技术制作的微加速度计应用到起重机的防摇控制系统中,即时检测小车运行加速度并估计得到吊重偏摆角度。通过建立闭环
控制系统,适时根据吊重摆幅大小修正小车速度指令,实现防摇控制。这种方法克服了传统的机械式防摇技术及带视觉传感器
电子防摇技术中的不足与缺陷,达到理想的控制效果。
起重机吊重摆动的数学模型起重机吊重摆动的数学模型
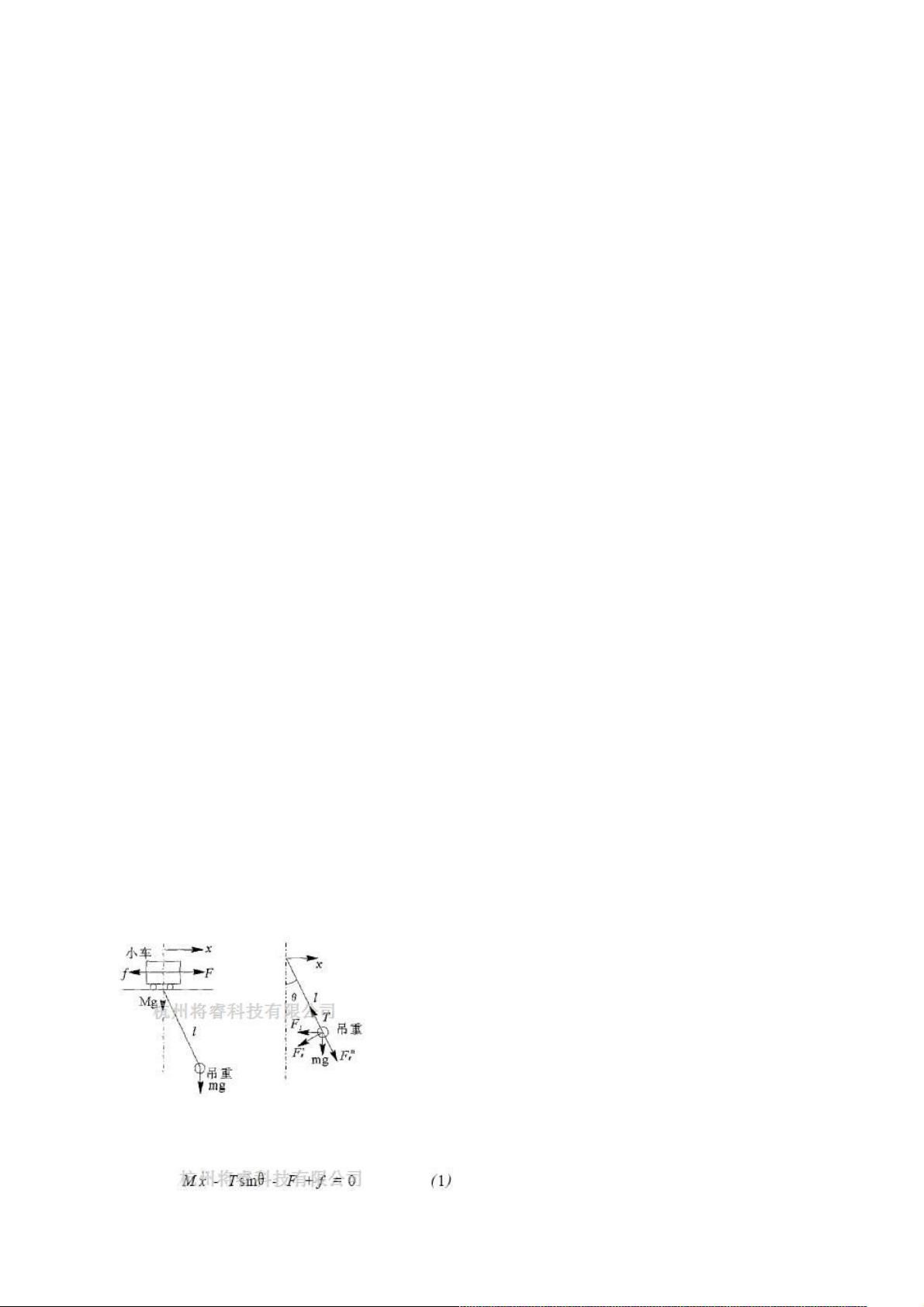
小车-吊重摆动系统简化力学模型分析如图1(a)所示。M和m分别为小车和吊重的质量,l为缆绳的长度,x表示小车在水平
方向上的位移,θ表示吊重的摆角,F为小车运行牵引力,f为小车运行静阻力,g为重力加速度。
为了便于分析,根据起重机工作的基本情况,这里作一些简化处理:
(1)假定小车在行走的过程中,缆绳的质量相对于吊重及小车的质量可忽略不计;
(2)吊重及吊架看作整体视为质量块m加以分析;
(3)吊重与缆绳在运行过程中所受的风力和空气阻尼以及系统的弹性变形均不计。
(a)小车-吊重摆动系统 (b)吊重受力平衡
图1 小车-吊重系统力学模型
如图1(b)所示,设缆绳的张力为T,取x、θ为广义坐标,对小车建立运动微分方程:
根据达朗伯原理,对吊重进行受力分析,它受重力mg,缆绳张力T,法向惯性力F
n
g
,切向惯性力F
τ
g
,水平惯性力F1作
用。如图1( b)所示。在水平方向上建立平衡方程,有
下载后可阅读完整内容,剩余4页未读,立即下载
2018-11-06 上传
2020-07-13 上传
2021-01-19 上传
2023-07-30 上传
2023-09-11 上传
2023-11-24 上传
2023-05-23 上传
2023-05-11 上传
2024-05-14 上传

weixin_38713099
- 粉丝: 4
- 资源: 905
 我的内容管理
展开
我的内容管理
展开







最新资源
- Android圆角进度条控件的设计与应用
- mui框架实现带侧边栏的响应式布局
- Android仿知乎横线直线进度条实现教程
- SSM选课系统实现:Spring+SpringMVC+MyBatis源码剖析
- 使用JavaScript开发的流星待办事项应用
- Google Code Jam 2015竞赛回顾与Java编程实践
- Angular 2与NW.js集成:通过Webpack和Gulp构建环境详解
- OneDayTripPlanner:数字化城市旅游活动规划助手
- TinySTM 轻量级原子操作库的详细介绍与安装指南
- 模拟PHP序列化:JavaScript实现序列化与反序列化技术
- ***进销存系统全面功能介绍与开发指南
- 掌握Clojure命名空间的正确重新加载技巧
- 免费获取VMD模态分解Matlab源代码与案例数据
- BuglyEasyToUnity最新更新优化:简化Unity开发者接入流程
- Android学生俱乐部项目任务2解析与实践
- 掌握Elixir语言构建高效分布式网络爬虫
