基于CSI的无设备Wi-Fi室内定位自动编码分类
需积分: 9 170 浏览量
更新于2024-09-11
4
收藏 409KB PDF 举报
本文主要探讨了一种基于无线室内环境的室分量感知室内定位(CSI-based Indoor Localization)方法,特别是在利用自动编码器(Autoencoder)进行机器学习算法的背景下。随着移动应用的普及和人们对位置服务需求的增长,传统的室内定位技术如GPS在室内环境中的表现不佳,因为GPS信号难以穿透建筑物,且许多现有的解决方案,如红外、超声波和无线电频率系统,往往依赖于携带特殊硬件(如智能手机或RFID设备),这限制了它们的便利性和用户体验。
文章首先强调了室内定位的重要性,特别是在没有携带设备的情况下实现的无源定位对于满足日益增长的需求至关重要。传统的基于信号强度的方法存在局限性,例如接收信号强度指示(RSSI)方法,其精度受到信号衰减和多径效应的影响。
文章的核心部分介绍了使用 CSI(Channel State Information,信道状态信息)来增强室内定位性能。CSI 是一种无线通信技术中获取无线信道特性的一种手段,它包含了无线信号在传输过程中的衰落、多径传播等信息,这些信息可以提供比 RSSI 更丰富的定位线索。作者提出了一种结合自动编码器的机器学习方法,通过自动编码器的学习能力,能够从复杂的CSI数据中提取有用的特征,从而提高定位精度和鲁棒性。
自动编码器是一种无监督学习模型,它包括一个编码器网络和一个解码器网络,用于学习数据的压缩表示。在这个室内定位场景中,编码器将接收到的CSI数据压缩到一个低维空间,而解码器则试图恢复原始数据。通过训练,自动编码器能够学习到与位置信息相关的特征模式,使得即使在信号质量较差的环境下,也能更准确地推断出设备的位置。
作者的研究旨在克服传统室内定位技术的不足,提供一种无需携带额外硬件的、基于CSI数据的室内定位解决方案。这种方法可能在智能家居、智能游戏或其他物联网应用中展现出巨大的潜力,因为它能够在不依赖于用户设备的情况下,提高室内定位的实时性和准确性,从而提升用户体验和便利性。
1
INTRODUCTION
Localization is becoming increasingly important in daily
life, for location-based services can be one of the most
indispensable techniques for mobile applications. With the
popularity of lots of new techniques such as somatosensory
game and home automation, a good plan for indoor
localization calls an emergency. Unfortunately, there are
few plans that concentrate on indoor localization, and most
of those are not good enough to come into the public.
For example, the Global Positioning System (GPS) does
not perform effectively in indoor environment because it is
hard for GPS signals to penetrate buildings, besides, most
of current systems such as GPS system, infrared, ultrasonic
and radio frequency (RF) share an identical requirement
that special hardware must be carried such as smart phone
or radio-frequency identification (RFID) [1]. Nevertheless,
such device-based systems are deficient in satisfying
people’s growing demands. Therefore, device-free indoor
localization problem has been drawing much attention from
a large range.
The majority of previous localization approaches are based
on received signal strength indicator (RSSI), which
measures the radio frequency (RF) signal strength at the
receiver. It is able to detect the position of object in the
This work is supported by National Natural Science Foundation of
China (No. 61273078, 61471110), China Postdoctoral Science Special
Foundation (No.2014T70263), China Postdoctoral Science Foundation
(No.2012M511164), Chinese Universities Scientific Foundation
(N13040402 3, N110804004, N140404014), Liaoning Doctoral Startup
Foundation (No.20121004), Foundation of Liaoning Educational
Commission (L2014090).
interested area by distinctive changes instead of directly
localizing the tracked object with the carrying hardware.
And it is easy to calculate the distance between the signal
emitter and the receiver according to propagation loss
model. From the comparison between RSSI and the
approaches mentioned above, we can see that RSSI has
already overcome the above difficulties.
But nowadays people argue that there are two significant
reasons why RSSI is not appropriate for indoor localization.
First, it is hard to acquire accurate RSSI value for per
packet and RSSI may fluctuate inherently which will
reduce sensitivity to environmental change caused by
object. Second, RSSI is vulnerable to multipath effect
which creates inestimable errors.
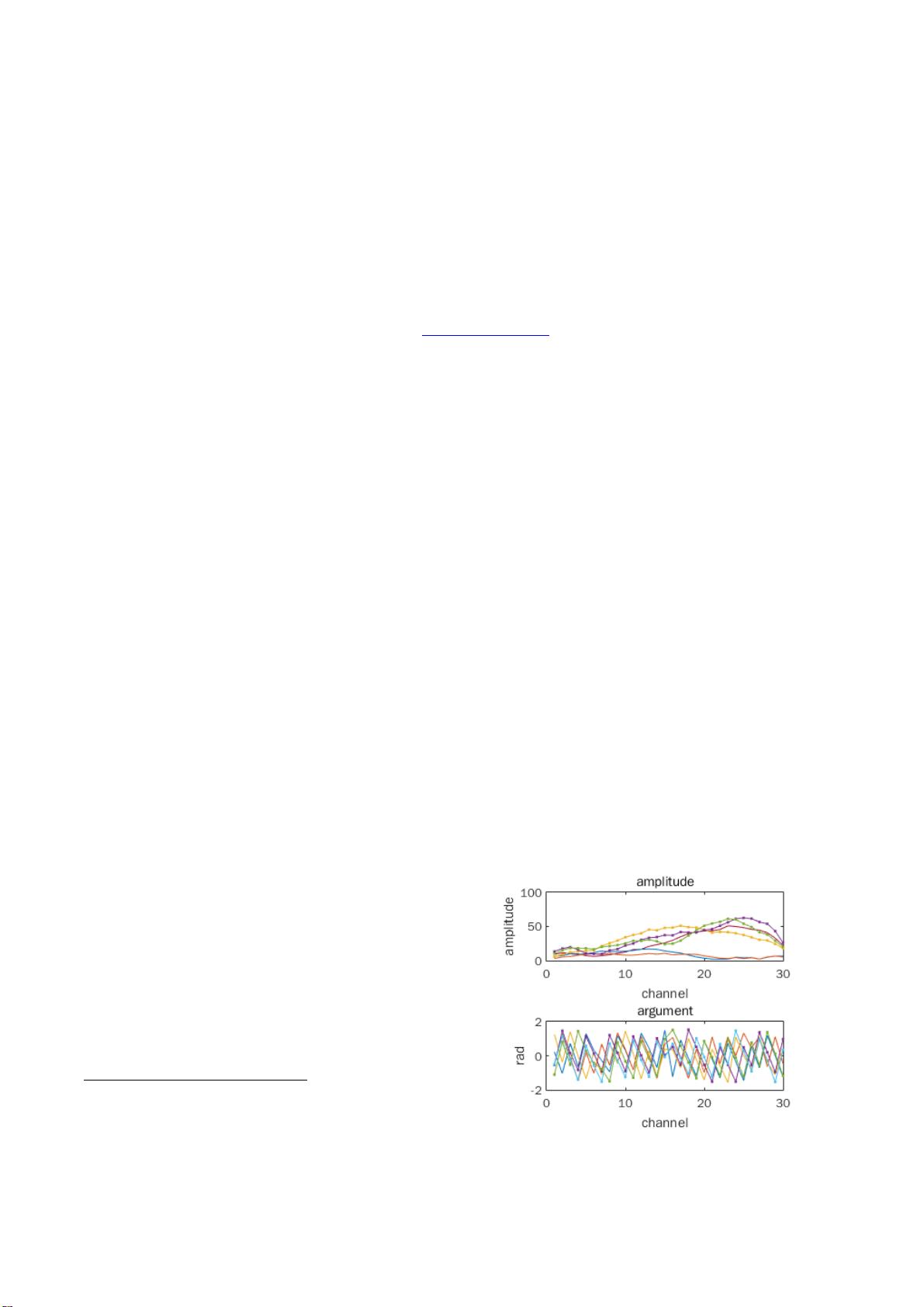
Channel State Information
Fig 1.Channel State Information, it includes huge information including
intensity and phase, so it’s better than RSSI.
CSI-based Autoencoder Classification for Wi-Fi Indoor Localization
Chengcheng Xu
1
, Zixi Jia
1*
, Pan Chen
1
, Bo Wang
2
1. College of Information Science and Engineering
2. School of Metallurgy
Northeastern University, NO. 3-11 Wenhua Road Heping District, Shenyang 110819, China
* Corresponding author
E-mail: jiazixi@ise.neu.edu.cn
Abstract: Recently, indoor localization problem has drawn a wide range of attention. However, there are few researches
that can keep balance between accuracy and expense, and few plans can achieve both device-free and accuracy. To solve
this problem, the scheme of CSI-based autoencoder classification for Wi-Fi indoor localization is proposed. Only one
wireless router and one computer are placed as signal emitter and receiver respectively. With so few ordinary devices,
expenses have been decreased to a large extent. Device-free is achieved by performing localization based on Wi-Fi
signal. Channel State Information (CSI) is measured and calculated to decrease the multipath effect, which reaches a
higher accuracy. With the use of CSI, a mass of data are obtained. Machine learning including autoencoder and BP
network are utilized owing to their advantage of processing mass data. In our experiment, this plan achieves 2-dim
localizing with an accuracy of 50 cm.
Key Words: Channel State Information, Indoor Localization, Autoencoder, Classification, Machine Learning
下载后可阅读完整内容,剩余5页未读,立即下载
2021-03-31 上传
2019-06-11 上传
2021-04-03 上传
2024-02-24 上传
2021-05-21 上传
2022-03-16 上传
2024-04-19 上传
2021-04-12 上传

Demiurge
- 粉丝: 5
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- Fisher Iris Setosa数据的主成分分析及可视化- Matlab实现
- 深入理解JavaScript类与面向对象编程
- Argspect-0.0.1版本Python包发布与使用说明
- OpenNetAdmin v09.07.15 PHP项目源码下载
- 掌握Node.js: 构建高性能Web服务器与应用程序
- Matlab矢量绘图工具:polarG函数使用详解
- 实现Vue.js中PDF文件的签名显示功能
- 开源项目PSPSolver:资源约束调度问题求解器库
- 探索vwru系统:大众的虚拟现实招聘平台
- 深入理解cJSON:案例与源文件解析
- 多边形扩展算法在MATLAB中的应用与实现
- 用React类组件创建迷你待办事项列表指南
- Python库setuptools-58.5.3助力高效开发
- fmfiles工具:在MATLAB中查找丢失文件并列出错误
- 老枪二级域名系统PHP源码简易版发布
- 探索DOSGUI开源库:C/C++图形界面开发新篇章
