DSP实现的自适应滤波器设计与LMS算法研究
需积分: 9 9 浏览量
更新于2024-08-05
收藏 282KB PDF 举报
"基于DSP的自适应滤波器的实现"
在数字信号处理领域,自适应滤波器是一种能够根据输入信号的变化实时调整其滤波系数的滤波器,这使得它在处理非稳态、随机或时变信号时表现出优越性能。基于DSP(数字信号处理器)的自适应滤波器设计是这一领域的核心内容,因为它可以高效、实时地执行复杂的计算任务。
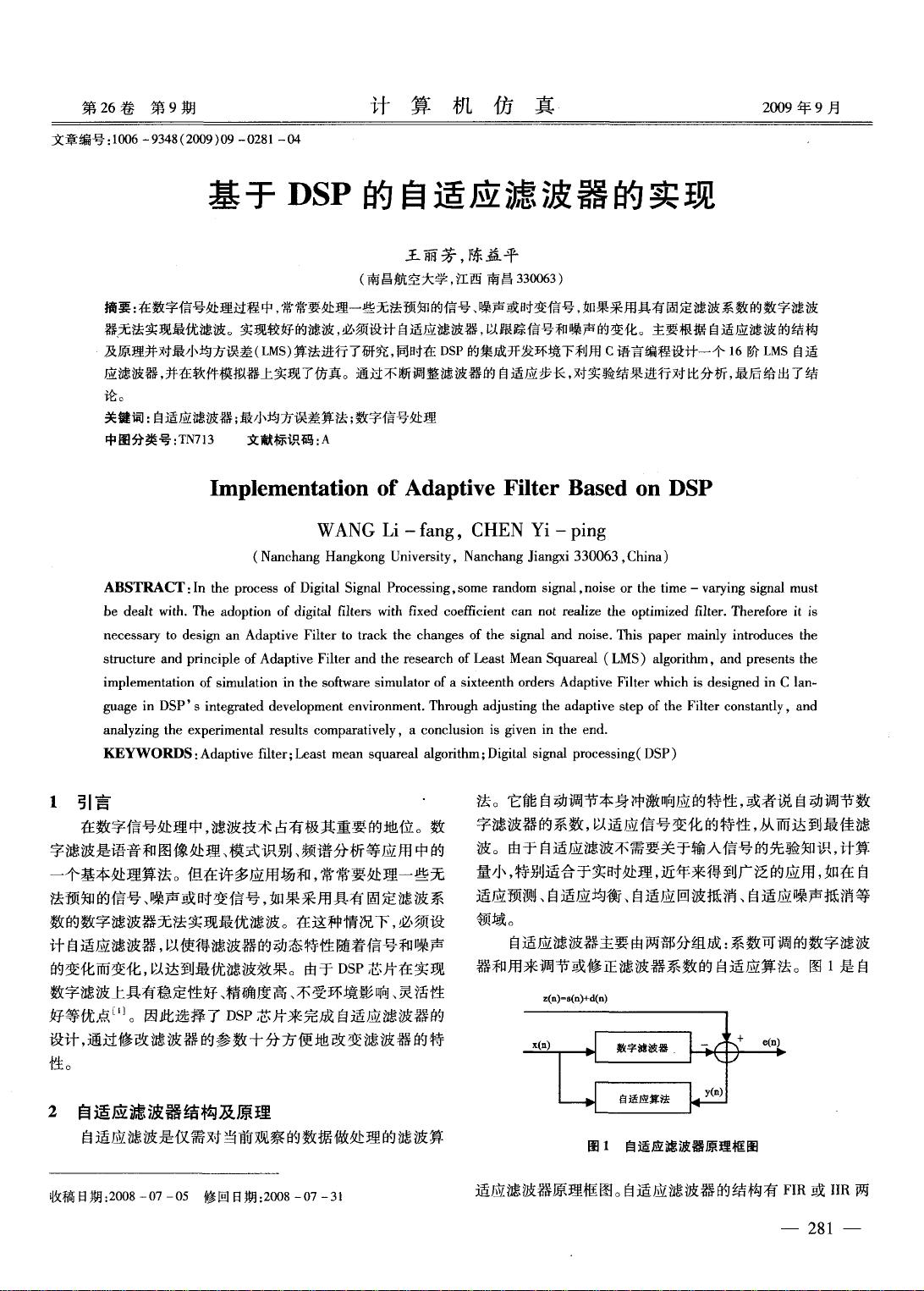
自适应滤波器的基本结构通常包括滤波器系数更新模块、输入信号处理模块和误差计算模块。滤波器系数更新模块是自适应滤波器的核心,它通过比较输入信号和参考信号的误差来调整滤波器的系数,以达到最小化误差的目的。在本文中,作者主要探讨了基于最小均方误差(LMS)算法的自适应滤波器设计。
LMS算法是一种在线学习算法,它的目标是通过迭代更新滤波器系数来最小化输出误差的均方值。该算法具有简单、易于实现和低计算复杂度的优点,因此在实际应用中非常受欢迎。LMS算法的更新公式如下:
\[ w(n+1) = w(n) + \mu e(n) x(n)^T \]
其中,\( w(n) \) 是当前的滤波器系数向量,\( \mu \) 是步长参数,\( e(n) \) 是当前误差,\( x(n) \) 是输入信号向量。步长参数 \( \mu \) 控制了滤波器系数更新的速度,适当的步长选择对于算法的收敛速度和稳定性至关重要。
在DSP平台上实现自适应滤波器时,通常使用C语言进行编程,因为C语言具有良好的移植性和高效的执行效率。文章中提到,作者在DSP的集成开发环境下设计了一个16阶LMS自适应滤波器,并在软件模拟器上进行了仿真。通过改变步长参数 \( \mu \),作者对比分析了不同步长下的滤波效果,从而得出最佳的步长选择。
实验结果的对比分析对于优化滤波器性能至关重要。通过调整步长,可以平衡滤波器的收敛速度与稳态误差。较大的步长可能会导致更快的收敛,但可能增加稳态误差;相反,较小的步长可以减少稳态误差,但会减慢收敛速度。因此,找到合适的步长是自适应滤波器设计的关键。
这篇文章深入探讨了基于DSP的自适应滤波器实现,特别是在LMS算法的应用上下文中。通过对滤波器的仿真和实验,作者展示了如何在实际系统中有效地应用自适应滤波技术,以处理复杂和变化的信号环境。这种技术广泛应用于通信、声学、图像处理等多个领域,对于提高信号处理的准确性和实时性具有重要意义。
下载后可阅读完整内容,剩余3页未读,立即下载
2021-10-30 上传
2021-07-13 上传
2021-09-14 上传
2021-07-13 上传
2021-10-16 上传
2021-07-13 上传
2021-07-13 上传
2022-11-24 上传

lqb804
- 粉丝: 0
- 资源: 13
 我的内容管理
展开
我的内容管理
展开







最新资源
- DTSR fMRI 重建:通过施加双时间稀疏性进行 fMRI 重建的 DTSR 方法-matlab开发
- Git安装
- workload-collocation-agent:业务流程感知的工作负载并置代理-一个可以帮助您并置工作负载的守护程序
- 蓝色天空下载PPT模板
- cards.io:用于数字名片的 MERN 应用程序
- 页
- mad-eye-moody:SpotifyMoodify应用程序HackNC 2018
- 钢结构施工组织设计-04SG519-2多、高层建筑钢结构节点连接(主梁的全栓拼接)
- 图像光盘
- 训练有素的模型和代码来预测 3 个拼图挑战中的有害评论:有毒评论分类、有毒评论中的意外偏见、多语言有毒评论分类
- Kozak 散点图:这个易于阅读的散点图可以快速突出显示变量的最小值和最大值。-matlab开发
- 古典花纹背景PowerPoint下载PPT模板
- 电影:使用REST API的快速演示应用程序
- myo-java-JNI-Library:为myo-java项目构建JNI DLL所需的C ++ C文件
- Klix.ba-crx插件
- OverdriveNTool 0.2.9:最新版本 0.2.9-开源
