不等半径泊车算法优势分析:MATLAB仿真与比较
86 浏览量
更新于2024-09-01
13
收藏 767KB PDF 举报
"自动泊车系统仿真研究"
自动泊车系统是一项重要的智能汽车技术,它借助先进的传感器和控制算法,帮助驾驶员在狭小的空间内轻松完成泊车操作,减少了因泊车困难引起的事故风险。本研究关注的核心是泊车算法的比较和仿真,特别是最小半径泊车算法和不等半径泊车算法。
最小半径泊车算法是基于车辆能够以最小的转弯半径完成泊车的一种方法,这种算法通常要求车辆精确地停在泊车位的特定起始位置,以便车辆能顺利入库。然而,在实际应用中,找到这样的理想起始位置可能较为困难。
相比之下,不等半径泊车算法则更为灵活,它允许车辆在泊车位附近的更宽范围内开始泊车过程。这种算法考虑到车辆在不同阶段的转弯半径是变化的,从而能够适应泊车过程中位置的小幅度偏差。通过对这两种算法在MATLAB环境下的仿真,研究发现不等半径泊车算法在实际操作中更具优势,对泊车起始位置的要求相对宽松,更易于实施。
在模型建立与算法分析部分,研究首先建立了汽车的运动学模型,假设车辆在低速倒车时速度恒定,不考虑侧滑现象。根据车辆前后轴的相对位置关系,推导出车辆的角速度和速度表达式,这些公式是泊车算法的基础。然后,通过这些数学模型,对最小半径泊车和不等半径泊车的路径规划进行了理论分析。
仿真过程包括了对两种算法的详细计算和比较,收集了丰富的数据以评估它们的性能。通过比较仿真结果,可以清晰地看到不等半径泊车算法在实际泊车场景中的优势,即对初始泊车位置的宽容度更高,更适合实际道路条件。这为自动泊车系统的优化设计提供了有价值的参考。
此外,文中还提到了国内外的研究进展,如法国Paromtchik等人的泊车轨迹研究,台湾Chao等人的全景摄像头泊车路径生成,以及德国艾尔默斯公司的超声波传感器芯片在倒车辅助系统中的应用。这些工作都为自动泊车技术的发展做出了贡献,但并未深入探讨泊车起始位置的误差对算法的影响。
浙江大学的研究团队在此领域进行了深入研究,他们提出的泊车路径算法虽有效,但未与不等半径泊车算法进行直接对比,也没有对起始位置的误差进行详细分析。本研究弥补了这一空白,为自动泊车系统的设计提供了更全面的理解和改进方向。
本研究通过理论分析和仿真实验,揭示了不等半径泊车算法在实际操作中的优越性,为自动泊车系统的实际应用提供了有力支持。未来的研究可以进一步探讨如何优化这些算法,提高泊车的精度和效率,以满足日益复杂的停车需求。
自动泊车系统仿真研究自动泊车系统仿真研究
对比分析了最小半径泊车算法和不等半径泊车算法的基本原理,分析了汽车在低速情况下泊车入库时的后轮轨
迹特点。同时在MATLAB环境下对两种算法进行了仿真研究,并且对仿真数据进行了比较分析。结果表明,不
等半径泊车算法对泊车起始位置要求相对较低,更符合实际操作需求。
摘摘 要要: 对比分析了最小半径泊车算法和不等半径泊车算法的基本原理,分析了汽车在低速情况下泊车入库时的后轮轨迹
特点。同时在MATLAB环境下对两种算法进行了仿真研究,并且对仿真数据进行了比较分析。结果表明,不等半径泊车算法对
泊车起始位置要求相对较低,更符合实际操作需求。
关键词 关键词:
0 引言引言
自动泊车系统是一种智能汽车安全辅助系统,是一种全新的智能驾驶技术,它能够使汽车驾驶员在复杂的城市环境内快速
便捷地完成泊车任务,降低了因泊车空间狭小或驾驶技术不熟练而引发交通事故的概率,对于当前汽车工程领域的研发具有重
要意义[1-2]。
近几年,国内外很多学者对自动泊车系统进行了相关研究。法国国立计算机及自动化研究院Paromtchik等人研究了泊车运
动轨迹方面的工作[3],台湾成功大学Chao等人通过全景摄像头获取模型小车相对于车位之间的位置并生成可行的参考泊车路
径[3],德国艾尔默斯公司(Elmos)宣布推出可用于驱动超声波传感器的E524.02和E524.03数字超声波倒车辅助系统系列芯
片[4],其中浙江大学开展的相关研究是该领域的优秀代表。浙江大学周泓、王文飞对实现自动泊车系统涉及到的3个核心算法
进行了探索和研究[5],根据泊车位空间信息,通过泊车路径算法计算出一条最简单泊车的行车路径,但是并没有将该算法与
不等半径泊车算法进行对比,没有对泊车起始位置的误差进行数据分析。本文针对泊车起始位置的选择,以泊车路径规划为依
据,对比分析了最简单泊车算法和不等半径泊车算法的基本原理,通过仿真数据分析,总结出两种泊车算法对汽车起始位置的
约束范围。
1 模型建立与算法分析模型建立与算法分析
1.1 运动学模型的建立运动学模型的建立
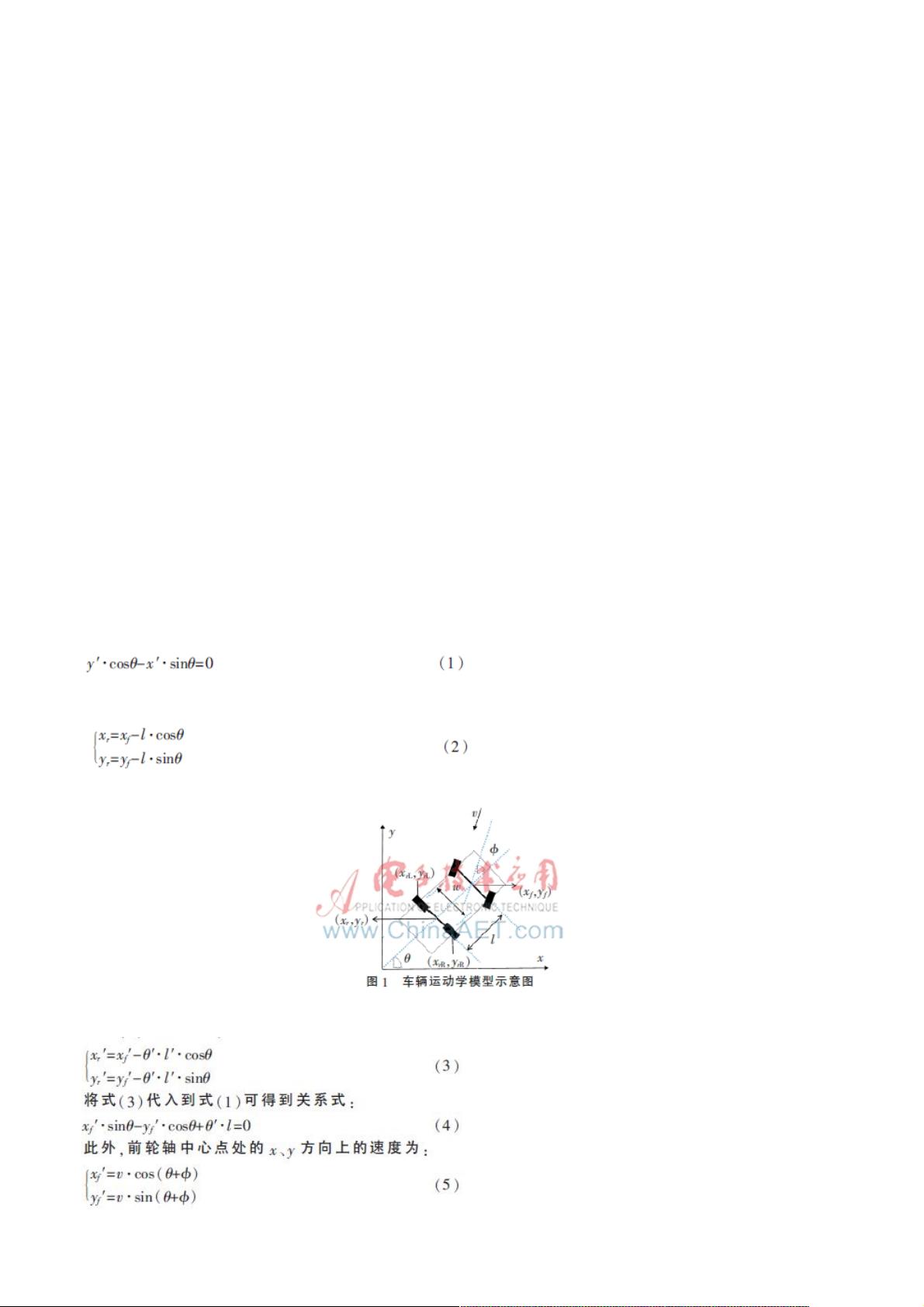
正常情况下,汽车倒车过程可以认为是低速保持不变的过程[6],在这种情况下车轮不会发生侧滑,可以认为车后轮垂直
方向速度为0,其方程式为:
根据图1车辆运动学模型[7]可知,汽车前、后轴中心点位置关系有:
对式(2)进行微分,得到其速度关系表达式:
由此将式(5)代入式(4),即可求得车辆回转圆角速度为:
下载后可阅读完整内容,剩余3页未读,立即下载
181 浏览量
点击了解资源详情
点击了解资源详情
181 浏览量
373 浏览量
2024-06-20 上传
点击了解资源详情
507 浏览量
211 浏览量

weixin_38631960
- 粉丝: 5
- 资源: 920
 我的内容管理
展开
我的内容管理
展开







