掌握Robotics Toolbox:Link与Seriallink函数详解
需积分: 5 58 浏览量
更新于2024-08-04
收藏 443KB PDF 举报
Robotic Toolbox 是一个强大的工具箱,用于在MATLAB环境中模拟和控制机器人系统。它提供了丰富的功能和组件,使用户能够构建、分析和仿真各种类型的机械臂。本文将详细介绍如何使用该工具箱中的两个核心类——Link和SerialLink,来创建和操作机器人模型。
首先,Link类是构成机器人的基本单元,它包含了连杆的各种关键参数。Link对象支持以下属性和方法:
1. **运动学参数**:Link包含四个D-H参数(theta, d, a, alpha),这些参数用于描述连杆的几何和运动特性。
2. **惯性信息**:包括质量(m)、质心位置(r)和惯性张量(I),这对于动力学分析至关重要。
3. **驱动力和摩擦力**:通过设置friction和nofriction属性可以控制关节摩擦力的存在与否,以及动态参数的显示。
4. **检测功能**:islimit用于检查关节变量是否超出预设范围,isrevolute和isprismatic分别判断关节类型。
5. **显示功能**:display和char允许用户查看和转换为字符串形式的D-H矩阵。
创建连杆实例时,例如`L = link('d',1.2,...)`,你需要提供各个参数值,如长度、角度等,并根据需要设置摩擦、极限位置等。
SerialLink类则代表整个机械臂的结构,它是Link的串联组合。这个类提供了更多的高级功能,如:
- **机器人建模**:`R = SerialLink(links,options)`,通过向量links链接多个Link对象,形成完整的机器人模型。
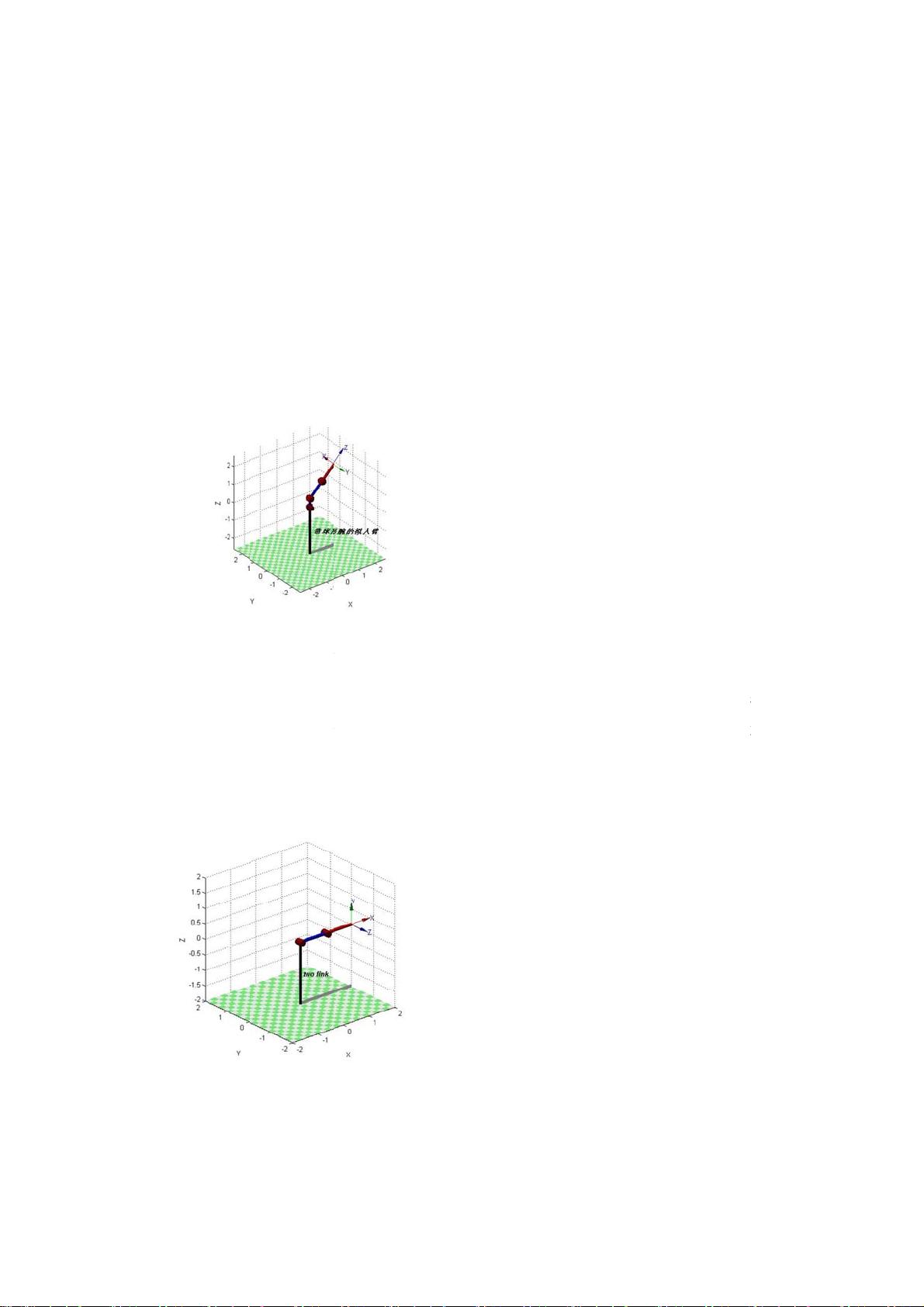
- **图形展示**:`R.plot(theta)`用于可视化机器人的关节角度配置,便于理解和调试。
- **动力学和逆动力学**:SerialLink支持计算和分析机器人的动力学行为,这对于控制设计至关重要。
- **雅可比矩阵**:用于求解末端执行器的速度和力的空间映射,是机器人控制的基础。
SerialLink类的属性和方法还包括:
- 关节数据存储:links向量、关节限制、偏移量等。
- 附加信息:如机器人名、制造商名、注释等。
- 其他属性,如机器人关节配置、D-H矩阵类型等,这些都是在分析和控制过程中不可或缺的数据。
通过熟练掌握Robotic Toolbox的Link和SerialLink类,用户能够有效地创建和操作复杂的机器人模型,进行运动学分析、动力学建模以及实时控制,是进行机器人研究和应用的强有力工具。
|
2
|
3
|
4
|
5
|
6
+--
-
gra
v
plo
t
参
数
dis
p
gra
v
bas
e
但
有
械
臂
改
变
况
下
(
二
mat
l
的
函
时
可
2|
3|
4|
5|
6|
-
+--------
-
v
= 0
b
0
9.81
t
的图形为:
数
说明
p
lay 显示
的
v
,重力加
速
e
,基座标的
有
些机器人
的
臂
的基座标
系
变
grav 矢量
的
下
是重合的。
二
):正/逆
运
l
ab 机器人
工
函
数:Seria
l
可
以使用 Ser
q2
|
q3
|
q4
|
q5
|
q6
|
-
--+------
-
b
ase = 1
0
0 1
0
0
0
0
的
结果中,
除
速
度矢量
齐次矩阵,
正
的
基座标系
竖
系
与 plot 图
的
的
值了。 to
o
运
动学
工
具箱 robo
t
l
Link.fkin
e
ialLink.ik
i
0
|
0
|
1
|
0
|
1
|
-
----+-----
-
0
0 0 t
o
0 0
0
1 0
0
0 1
除
了D-H参数
正
常情况下,
竖
直方向不是
的
默认坐标
系
o
l,指工具
坐
t
ic toolbo
x
e
(theta),
可
i
ne(T) 求
逆
0.5
|
0
|
0
|
0
|
0
|
------+---
-
ool = 1
0
0
1
0
0
0
0
外,还有三
个
竖直方向 Z
Z轴(如下
图
系
之间的变
换
坐
标系和末
端
x
做运动学
分
可
以直接对
已
逆
运动学参
数
0
|
1.571
|
-1.571
|
1.571
|
0
|
-
-------+-
-
0
0 0
1
0 0
0
1 0
0
0 1
个
矩阵,gr
a
轴(看重力
加
图
,两连杆
机
换
关系。如果
端
连杆的坐
标
分
析非常方
便
已
经建立的
机
数
。
1.571
|
0.7854
|
0
|
0
|
0
|
-
---------
+
a
v,base,to
o
加
速度矢量
)
机
械臂),
基
不改变 bas
e
标
系之间的
变
便
,SerialL
i
机
器人模型
做
+
o
l
)
,如上图
所
基
座标矩阵
就
e
坐标,那么
变
换矩阵。
一
i
nk 类中有
现
做
运动学分析
所
示。
就
是机
就要
般情
现
成
,同
剩余13页未读,继续阅读
152 浏览量
点击了解资源详情
326 浏览量
127 浏览量
144 浏览量
150 浏览量
2022-07-15 上传
185 浏览量
313 浏览量

FL17171314
- 粉丝: 3w+
- 资源: 60
 我的内容管理
展开
我的内容管理
展开







最新资源
- Versioning-Test
- 2019年南京大学软件学院夏令营机考操作说明
- mnist.npz 适合新手的手写数字识别本地数据集
- 爆破
- WCF飞行棋,适合初学者学习
- deadpool-死的简单异步池-Rust开发
- swing-zing-itext
- 行业文档-设计装置-食品加工用装卸车平台的台面结构.zip
- Phaninder_Reddy_152652_PHASE2
- 流游戏问题
- 云模块网站管理系统 v3.1.03
- SQP_Matlab.zip
- printpdf-PDF写作库-Rust开发
- konrvd-mirror.github.io
- 基于SSM框架+MySQL的超市订单管理系统【源码+文档+PPT】.zip
- 20210304-Immersive-WebAR
