直角坐标系三轴伺服机械臂设计
版权申诉
43 浏览量
更新于2024-06-14
收藏 1.17MB DOCX 举报
"三轴联动机械臂伺服运动机械结构设计"
本文主要探讨了三轴联动机械臂的伺服运动机械结构设计,这种机械臂在自动化机械领域,尤其是工业制造、医疗、娱乐、军事、半导体制造和太空探索等多个领域都有广泛应用。机械手臂作为机器人技术的重要组成部分,其特点是能够根据指令精确地在三维空间内定位并执行任务。
首先,机械手臂有多种结构形式,包括多关节机械手臂、直角坐标系机械手臂、球坐标系机械手臂、极坐标机械手臂和柱坐标机械手臂等。本文关注的是直角坐标系机械手臂,它由三个伺服电机驱动,分别对应X、Y、Z三个轴向的移动。这种设计使得机械臂能够在三个自由度上进行灵活运动,满足不同场景的需求。
伺服电机在机械臂中的作用至关重要,它们通过运动控制卡进行控制,确保运动的精确性和实时性。运动控制卡接收指令,驱动伺服电机旋转,进而带动丝杠转动。丝杠螺母副作为传动机构,当丝杠旋转时,螺母副会沿着丝杠轴向移动,实现了三个轴的线性运动。这种设计方式保证了机械臂在X、Y、Z三个方向上的准确位置控制,实现三轴联动,提升了操作精度和效率。
在实际应用中,这样的三轴联动机械臂可以用于生产线上的物料搬运、精密装配、产品检测等任务。通过编程,机械臂可以按照预设路径进行复杂的工作流程,极大地提高了生产自动化水平和工作效率。同时,由于伺服电机的高响应性和精度,这种机械臂也适用于需要高精度定位的领域,如半导体制造中的微米级操作。
此外,设计中还需要考虑机械臂的负载能力、动态性能、稳定性以及安全因素。负载能力是指机械臂能承载的最大重量,这直接影响到其工作范围和适用场景。动态性能涉及到机械臂的加速度、速度和响应时间,这些参数决定了其工作效率。稳定性则是保证机械臂在各种工况下保持正常工作的关键,而安全因素则涉及到避免对操作人员和其他设备造成潜在风险的设计。
三轴联动机械臂伺服运动机械结构设计是一个涉及机械工程、电气工程、控制理论等多个领域的综合课题。通过合理的结构设计和控制系统优化,可以实现高精度、高效率的自动化操作,满足现代工业生产对自动化设备的高要求。
的形式还与丝杆的长短有关,如果丝杆较短,采用单支撑结构,如果丝杆较长,
则需采用双支撑结构。
每种安装方式(即支撑方式)有其各自的特点,当选取安装方式时,在考虑
实际工作要求(如传动速度、定位精度、扭矩和推理情况等)的前提下,也要结
合所选择的滚珠丝杠副型号规格,只有两个因素综合考虑,才能实现理想的工作
状况。
由文献[19,20]可知“滚珠丝杠副的安装方式也可以叫做滚珠丝杠副的支撑
形式”,安装方式通常有两大类,一类是丝杠旋转,另一种是螺母旋转,两大类
共包括五种典型的安装方式,安装方式的不同会影响滚珠丝杠副所容许的回转速
度以及所能够承受轴向载荷。安装方式应该根据工况适当选择,具体安装方式下
文会详细介绍,为了方便比较安装方式的稳定性,引入“稳定性系数 f
k
”来表征
丝杠旋转类的每种安装方式的稳定性,f
k
数值越大则表示该安装方式越稳定,对
于螺母旋转类由于其受力模型不同,校验体系也不同,故不能模型化比较。所以
本文所设计的机械臂选用丝杠旋转类。
4.2.3 丝杠旋转类安装形式
1. “固定—固定”型:f
k
=4
本安装方式适用于高精度、高转速的场合。该方式两端分别装有一对轴承来
约束径向和轴向自由度,所受载荷由两组轴承副共同承担。也可以是两端的轴承
组承受反向预紧拉伸力,从而提高丝杠的传动刚度。在一些定位要求较高的场合,
甚至可以通过受力情况和丝杠运动发热变形趋势来精确设定目标行程的补偿量,
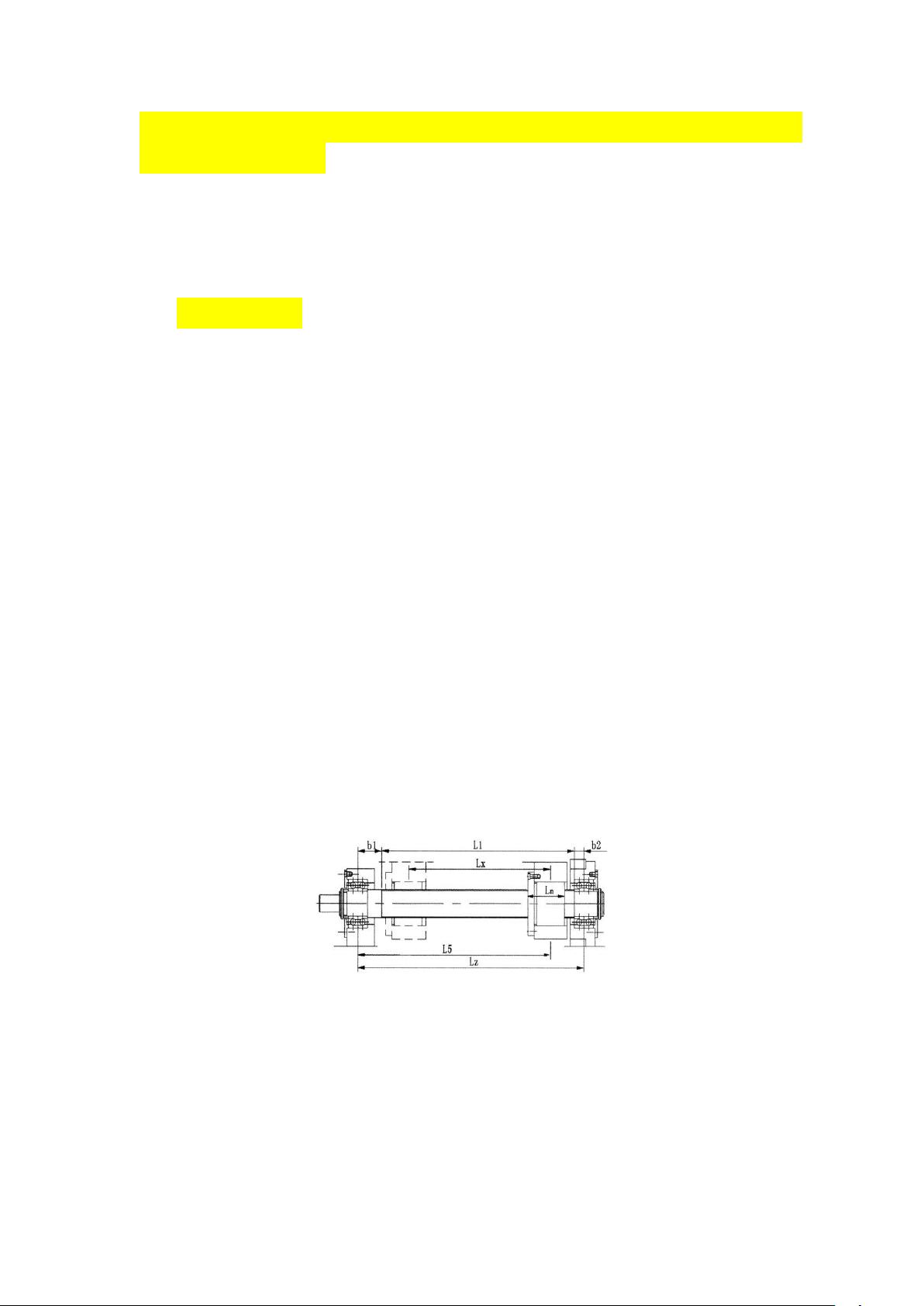
从而进一步提高定位精度。“固定—固定”型也叫“双推—双推” 型。在实际情
况中,由于径向力的存在,所以几乎不能用两个推力轴承来作为固定端。而且此
安装方式机构较为复杂,调整也较为困难,因此仅在定位要求很高的场合时才采
用“固定—固定”型,其结构简图如下。
图3-1 “固定—固定”型
2. “固定—游动”型:f
k
=2
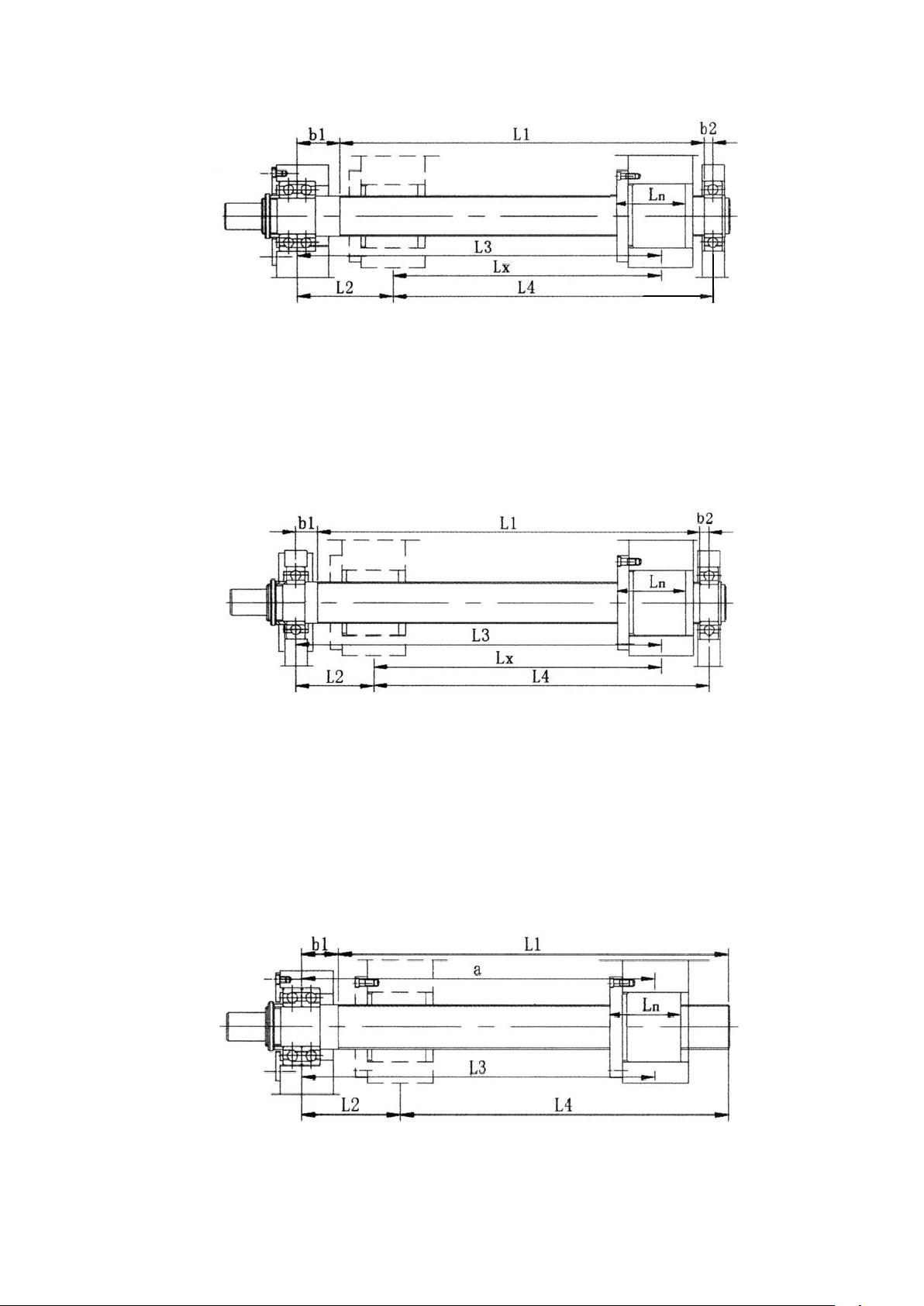
本安装方式适用于高精度、中转速的场合,该方式一端由一对轴承约束径向
和轴向自由度,而另一端由一个轴承来约束径向自由度,所承受的载荷只由一对
轴承副承担,而游动的单个轴承用来防止悬臂挠度,并且能够消除由运动发热产
生的应力,“固定—游动”型也叫做“双推—支撑” 型。此安装方式结构简单,应
用广泛,效果良好。其结构简图如下。
剩余35页未读,继续阅读
2023-06-10 上传
2023-02-24 上传
2023-05-31 上传
2023-05-27 上传
2023-05-30 上传
2023-09-04 上传

ohmygodvv
- 粉丝: 506
- 资源: 4416
 我的内容管理
展开
我的内容管理
展开







最新资源
- 十种常见电感线圈电感量计算公式详解
- 军用车辆:CAN总线的集成与优势
- CAN总线在汽车智能换档系统中的作用与实现
- CAN总线数据超载问题及解决策略
- 汽车车身系统CAN总线设计与应用
- SAP企业需求深度剖析:财务会计与供应链的关键流程与改进策略
- CAN总线在发动机电控系统中的通信设计实践
- Spring与iBATIS整合:快速开发与比较分析
- CAN总线驱动的整车管理系统硬件设计详解
- CAN总线通讯智能节点设计与实现
- DSP实现电动汽车CAN总线通讯技术
- CAN协议网关设计:自动位速率检测与互连
- Xcode免证书调试iPad程序开发指南
- 分布式数据库查询优化算法探讨
- Win7安装VC++6.0完全指南:解决兼容性与Office冲突
- MFC实现学生信息管理系统:登录与数据库操作
