Matlab机器人工具箱学习:旋转与变换解析
版权申诉
178 浏览量
更新于2024-06-28
收藏 1.31MB PDF 举报
"Matlab-Robotic-Toolbox工具箱学习笔记"
Matlab Robotics Toolbox 是一个强大的工具集,用于在Matlab环境中进行机器人学的建模、仿真和控制。本笔记主要分为三个部分来介绍该工具箱的核心功能:
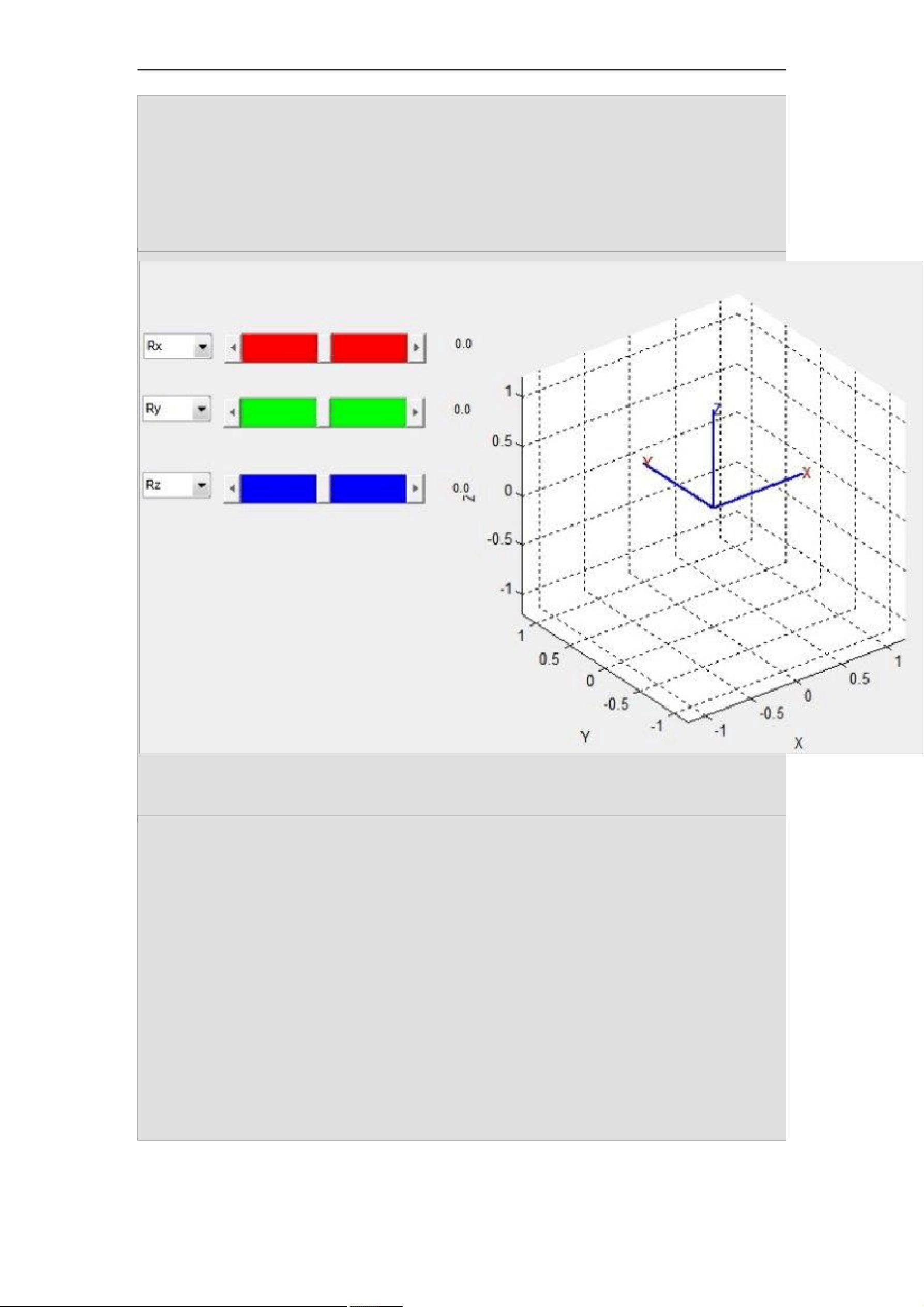
1. General(旋转、变换、轨迹)
- 旋转:在Robotics Toolbox中,可以方便地处理旋转矩阵,如`rotx`, `roty`, `rotz`函数分别用于绕x、y、z轴进行旋转。此外,`tr2angvec`函数用于将旋转矩阵转换为旋转轴和角度,而`tr2eul`则用于将其表示为欧拉角(例如Z-Y-X或Z-X-Y顺序)。同时,`tr2rpy`用于转换为roll-pitch-yaw角,而四元数表示可以通过`Quaternion`函数获得。
2. Arm(机械臂、动画、正向运动学、逆向运动学、雅可比矩阵、反动力学、正向动力学、符号计算、代码生成)
- 机械臂建模:工具箱支持多种类型的机械臂模型,包括正向和逆向运动学的计算。`Robot`类可用于创建机器人模型,`Animation`函数用于动态展示机械臂运动。雅可比矩阵(Jacobian)计算对速度和力矩转换至关重要,而`inversedynamics`和`forwarddynamics`函数分别用于计算反向动力学和正向动力学。`Codegeneration`功能允许将这些计算转换为可执行的C代码,提高效率。
3. Mobile(移动机器人、四旋翼飞行器、Braitenberg车辆、BUG算法、D*、PRM、SLAM、粒子滤波)
- 移动机器人导航:工具箱涵盖了多种路径规划和定位技术,如驾驶到指定位置 (`Drivingtoa pose`),四旋翼飞行器控制 (`Quadrotor`),Braitenberg车辆模拟 (`Braitenberg`),BUG算法 (`Bug`),D*动态路径规划,概率路网地图 (`PRM`),同时定位与建图 (`SLAM`),以及使用粒子滤波 (`Particlefilter`) 进行不确定性估计和跟踪。
在Transformations部分,工具箱还提供了平移和旋转的组合,通过`transl`进行平移,`troty`和`trotz`进行旋转,可以构建复杂的齐次变换矩阵。然后,`tr2eul`和`tr2rpy`函数可以帮助将这种变换表示为欧拉角或roll-pitch-yaw角,便于理解和可视化。此外,`tripleangle`函数可用于在不同旋转顺序之间转换欧拉角。
Matlab Robotics Toolbox 提供了丰富的函数和类来处理机器人学中的各种问题,包括但不限于旋转、变换、路径规划、动力学计算以及机械臂和移动机器人的建模。这个工具箱是研究和开发机器人系统时不可或缺的强大资源。
. . . . .
(7)q.R;
%界面,可以是“rpy”,“eluer”角度单位为度。
(8)tripleangle('rpy');
General/Transformations
%沿 x 轴平移 0.5,绕 y 轴旋转 pi/2,绕 z 轴旋转-pi/2
(1)t = transl(0.5, 0.0, 0.0) * troty(pi/2) * trotz(-pi/2)
%将齐次变换矩阵转化为欧拉角
(2)tr2eul(t)
%将齐次变换矩阵转化为 roll、pitch、yaw 角
(3) tr2rpy(t)
. . . .
剩余15页未读,继续阅读
2022-11-27 上传
673 浏览量
2022-11-27 上传
160 浏览量
161 浏览量
113 浏览量

春哥111
- 粉丝: 1w+
 我的内容管理
展开
我的内容管理
展开







最新资源
- J2EE培训:企业级软件开发深度解析
- 探索Ruby编程语言:资源、进阶与社区指南
- Symbian:移动办公的微核操作系统研究与环境配置详解
- 互联网搜索引擎:原理、技术与系统详解
- JSP+Tomcat基础配置与环境搭建详解
- CoreJava基础教程:从入门到精通
- 构建机票预定系统:需求与服务器功能分析
- Linux内核0.11完全解析
- 掌握数据流图绘制关键:基本符号与应用实例
- Struts1.2深度解析:核心标签库与架构详解
- Struts框架详解:构建高效Web应用
- UML使用案例驱动的对象建模:理论与实践
- Matlab实现的差分2DPSK调制解调系统仿真设计
- 2008版《Illustrated C#》:精通.NET框架与C#编程全览
- JBPM工作流开发实战指南
- C++Builder6实战指南:从基础到高级技术探索
